Post your parameter file. You should be seeing 2 compass’s, one on the Pixhawk and one on the GPS Module. The screenshot you posted only shows one so it’s not clear which one is active. The parameter file will show this. You may want to mount that GPS module on a stand to get some isolation. Why are you not using the ESC BEC to power the servo? Use the power module for the FC (looks like you are) and power the servo direct from the ESC BEC.
Dave,
Never created or posted a parameter file before. Hopefully this is correct, if not let me know.ParameterTree.param (13.0 KB)
My understanding is that the throttle lead from the ESC is bring power to the PX4 power rail, however the steering servo doesn’t work when the throttle lead is plugged in. When I plugged the 6.5v battery in, the servo did work. That seems strange to me. I am using the power module for the FC. Also, I will build a stand for the gyro once this ESC calibration is resolved
Chuck
Yes, that the right file. You have the MOT_PWM_TYPE set to Brushed which usually is not required for the type of ESC you have. I have used several Car/Truck ESC’s and they all work with normal PWM (parameter 0). This could be your problem with the steering servo as it will set a entire group of channels to Brushed.
You have 1 compass being recognized and it appears to be the Pixhawk internal one. The device ID (131594) is for a LSM303D which is on the PIxhawk. Specs say the GPS module you have has a LIS3MDL and a IST8310, neither of which are being identified. I don’t know why, contact mRo about it. An additional check you can do is on the Mandatory Hardware>HW ID page. Post a screen shot of that.
Note: You have the safety switch configured as active. OK, as long as you know this. I never use them on any craft. Also just a suggestion. Switch arming is a lot easier to use than stick arming.
1 Like
Dave,
Changing to normal still didn’t allow the calibration to happen. I reconfigured the DX9, putting the throttle on the right stick so that it is centered, and putting the steering on the left stick. This allowed the ESC to be calibrated. I then changed back to the brushed setting, but couldn’t calibrate. The problem I’m now having with the sticks reversed, whenever the ESC is powered on, I have to go back through the calibrating process. I’ve read that Spektrum doesn’t play well with the Traxxas ESC. I’m contemplating buying a Taranis transmitter and receiver. Do you know if that would be a better choice? There been two times today where the motor ran up to full speed without any explanation, that makes me very nervous.
Chuck
I’m at my wits end and it’s time to change something. Two problems, every time the Traxxas ESC is turned on it requires calibration, it doesn’t remember the previous calibration; with no explanation the ESC sends the motor to full speed. Definitely unsafe/unusable. Is the issue a Spectrum and Traxxas VL-5 incompatibility, if sowhich should I change? Is it an issue of airplane transmitters vs car transmitters? It seems a lot of people don’t have this problem, so what equipment are they using?
If the motor is at speed with a center throttle position it sounds like it’s not in forward/reverse mode. Or Forward/brake/reverse mode. Either one should be neutral at center throttle (1500us) and forward/reverse with >/< PWM.
Dave,
I’m using the right stick - elevator for the throttle. When it goes full throttle by itself, the right stick was in the neutral - center position. When it is programmed, it will run forward and reverse, but no brake.
Chuck
Chuck-No brake is OK, Ardurover has that function if you want to use it.
So you run thru the calibration routine with the button press, led flashing and stick movement and it works and then the next time it’s powered it’s throttle on at mid stick? I’m not really familiar with that ESC .
@dkemxr @count74 @ktrussell @David_Boulanger @iampete @rmackay9
To all the guys on here who for the past year have been a huge support in giving me advice & helping me with building my rover I want to wish you all a Happy New Year. I hope you all had a great Christmas too. Thank you guys I really appreciate everything you’ve taught me.
In the new year I will post a few pics of my rover as it’s almost finished!
All the best for 2020 guys🙏🏼
6 Likes
Happy New Year to you Mus! Looking forward to seeing the new Rover.
2 Likes
Same to you, Mus (a little late from me!). Can’t wait to see it!
1 Like
Hey Guys!
Hope your all keeping well. Just a quick update from me regarding my recent purchase of the ArduSimple SimpleRTK2B which I will be using as a stand-alone gnss receiver for my rover:
On the Pixhawk 2.1 i have hooked it up via the GPS2 port. On the SimpleRTK2B I have tried connecting from the Pixhawk connector which is a standard JST GH that can be used to connect the simpleRTK2B to a Pixhawk autopilot & also tried Using the USB micro-B connector gives you access to the native USB from the ZED-F9P module.
You can receive NMEA with the position, or have full access to the ZED-F9P using the u-center
Everything on the module seems to light up and I have a blinking gps light which means it has picked up a GPS lock.
Only problem is that in Mission Planner it doesn’t show any GPS position and seems to not be receiving any information from the module at all.
When I connect the SimpleRTK2B via usb to U-Centre everything is showing up and working perfectly so it isn’t a dud module. I think the data the SimpleRTK2B is sending out to the Pixhawk can’t be recognised or received for some reason.
Any advice from you guys as always is appreciated and I thank you in advance for your help.
@iampete @count74 @dkemxr @rmackay9 @ktrussell @David_Boulanger @Christopher_Milner
Muss, Great progress and nice pictures! I am now using the SimpleRTK2B on my mower (after using a Ublox C099-F9P for a while). I was able to just hook directly as you are with the JST connector and mine just worked. I am using the older Pixhawk, not the Cube, as you are, but that shouldn’t matter. Are you using the latest firmware on your Pixhawk? I am not sure what version implemented support for the ZED F9P.
Hey Kenny great to hear from you.
Also a big congratulations on your mower being acknowledged and posted “I think I saw it on hackaday” Great work!
Regarding the SimpleRTK2B I have had no success at all. I have tried using both firmwares Rover 3.5.2 and also Rover 4.0.0 with no luck. I wired up the SimpleRTK2B & Pixhawk 2.1 as follows:
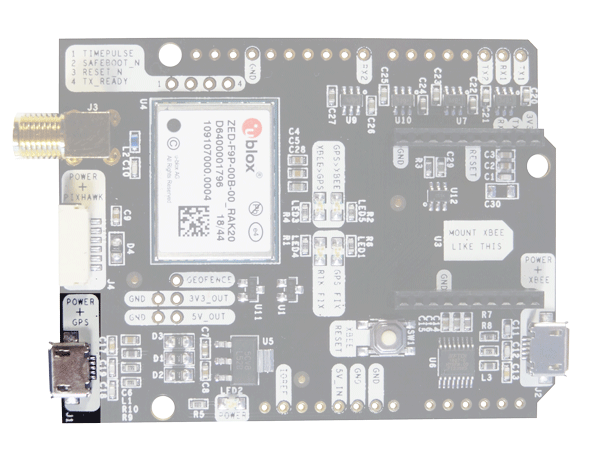
Wiring Method 1 Using JST GH:
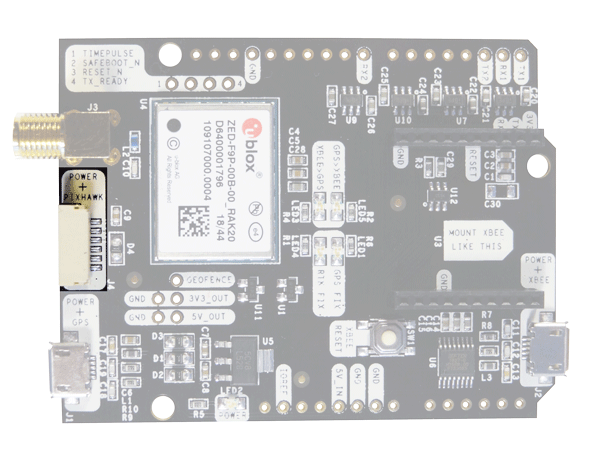
SimpleRTKB2 Pixhawk 2.1 GPS2
1: 5V_IN 1: VCC_5v
2: ZED-F9P UART1 RX. 2:TX of AP
3: ZED-F9P UART1 TX 3:RX of AP
4: Not connected 4:Not Connected
5: Not connected. 5:Not connected
6: GND 6: GND
As you can see the TX & RX are different on pins 2 & 3 compared to the Pixhawk. I have tried connecting like this and have also swapped the TX & RX Pins from the SimpleRTK2B to match the Pixhawk but neither wiring setups work.
Please Note that when done like this the SimpleRTK2B receives No Power.
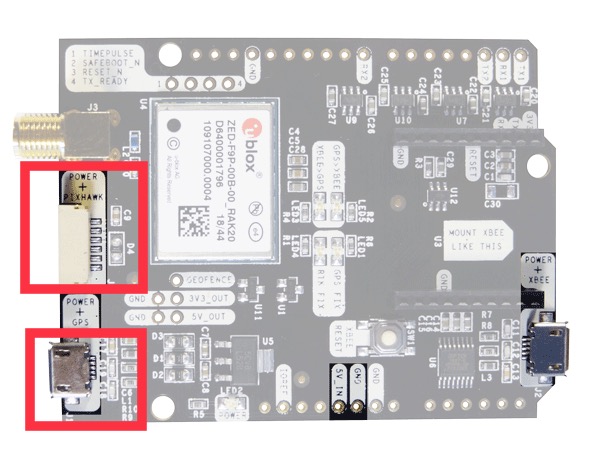
Wiring 2 using Micro USB from SimpleRTK2B:
I cut a micro usb wire and hooked it up from the USB GPS on the SimpleRTK2B and wired it up to the Pixhawk 2.1 GPS 2 Port.
The micro usb wire has 4 wires;
Red - 5v
Green Rx
White Tx
Black GND
I wired these4 wires into the Pixhawk GPS2 Port accordingly and even swapped the TX & RX wires around just in case I got them wrong.
Using this method made the SimpleRTK2B light up and receive power which is a good sign. Unfortunately even with getting power from this method I still cannot get the Pixhawk 2.1 to receive gps data from the module.
Also to mention I have connected the SimpleRTK2B directly into my pc via the Micro USB cable and it runs perfectly in U-Centre & picks up many satellites so it’s working just fine on its own but not when connected to the Pixhawk 2.1.
Thanks for your time Kenny🙏🏼
I believe Ardupilot should use an auto baud technique to detect the baud rate of the SimpleRTK2B but I would go into U-center and set the baud rate of UART1 (I believe that is the right port) to 115200 and be sure the Pixhawk is set that way, in case that is the trouble. Remember in U-center to save the config to flash.
In my case, I probably had the messages setup already in U-center the way that Ardupilot expects them, but I believe that should not be necessary, as Ardupilot should configure the F9P itself.
Ardupilot wants the UBX protocol, so you might be sure port 1 is set to that (using U-center).
But, I still do not believe you should have to do any of this.
Grasping at straws here: Do you have the GPS type for the port you are using on the pixhawk set to Ublox? Do you have the GPS enabled?
I’m confident you should not need to swap pins in the cable. Sometimes serial tx/rx labels on devices are from the perspective of the other end, which can be confusing!
1 Like
Hi Kenny,
Thank you for your advice and yes your right after changing settings back and forth with Mission Planner I finally managed to get the module to work on the Pixhawk 2.1.
It’s astonishing how good this module is because I was indoors and it picked up 30 satellites after running for 15-20 mins. I cannot believe how good that is!
With using it as an RTK like you are doing it must be extremely accurate. Thank you Kenny as always you’ve helped me out. I hope your mower is keeping well. I’m subscribed to your YouTube channel so I look forward to your next post. Cheers Kenny👍🏼
1 Like
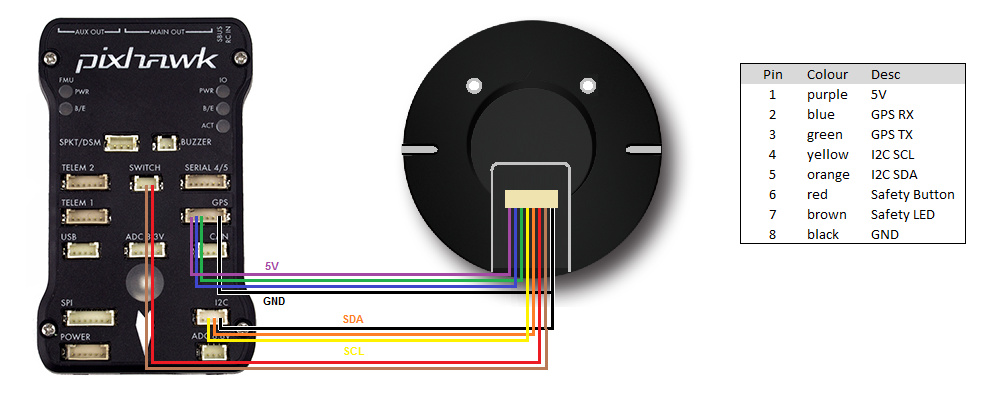
This is an off topic question. I have been using the Here 2 gps module for a long time.
What I like about it is the LED status lights that blink red & white & then to green when it has a successful gps position lock.
Now I will be using the SimpleRTK2B for GPS which unfortunately doesn’t have LED status on the Antenna like the Here 2 so is it possible to keep the Here 2 solely for Status LED functionality and disable the gps from working?
Would this be done by simply changing parameters or would I need to wire the Here 2 gps LED wires somewhere into the Pixhawk 2.1 to just get LED’s working?
Here’s a picture of the Here 2 but the Pixhawk shown is an older model as I’m using Pixhawk 2.1 Cube:
Hey Guys.
Just thought I’d share my recent progress with testing my latest instalment of the SimpleRTK2B GNSS Module. This test was done without a ground station, no RTK & no NTRIP.
I must say I’m very impressed with the level of accuracy on the auto mission I set at my local tennis court.
The Satellite count stayed around 22-23 with a HDOP of 0.5 - 0.6
@ktrusselln @iampete @dkemxr @dkemxr @David_Boulanger @rmackay9
1 Like
Hi Mus,
I would expect that that GPS status indicated by the Here 2 GPS is integrated into it and that none of the wiring from the Pixhawk to the Here 2 has anything to do with the GPS status LEDs, so I think what you are trying to do would not be possible.
You could, perhaps wire an external LED to the RTK2B so that you have the same status that it’s LED shows in a more accessible place. I have not looked to see if the LED status is brought out to a header pin to make that easy.
Kenny
Kenny
Congratulations on your initial success with the SimpleRTK2B. I would like to see the video, but it indicates it is private and I can’t view it.
1 Like