this is essentially the difference between accuracy and precision. Also note that you can save locations so if you were to come back to the same spot you don’t have to wait again. I think its a limit of the GPS infrastructure rather than the hardware.
Basically it will be precise to a CM level straight way, it takes the time to also be accurate to a CM level.
I followed your advice and when in acro mode the wheels move in the correct manner as you’ve explained. once I enter steering mode the turning of the wheels are then reversed but in acro mode they are ok.
then I reversed the setting on my transmitter and it corrected the turning it steering mode but it still seems this rover just wants to turn rather than head straight
That’s odd. The wheels should move the same way in Acro and Steering when the vehicle is turned as Sebastian has described The control methods are different, Rate vs Acceleration , but they should turn the same way.
Finally got mine cleaned up and did a cold (-4C) run to set the cruise throttle value (learning switch). Performance is very good, steering a bit sluggish but no worries at this stage with zero tuning. The crawler platform is much better suited than the 4wd truck I had for this purpose. ~4.5 m/s max speed and ~2.5 m/s at 31% throttle which should be perfect. I wanted to do a range test (Frsky 915Mhz R9 system) but it’s just too cold.
what a beast & a clean build! must be harsh on the hardware in such cold conditions and yet your rover performs well.
I just took mine out for a spin and a auto mission. seems to be doing well but I haven’t yet done Randy’s tuning tutorial for steering and throttle but I have already set Throttle Max to 50% which gives a nice smooth ride.
does yours slightly steer left or right whilst going down a straight waypoint line? or does it hold dead on the line? maybe the tuning might help with what I’ve seen or it might be gps accuracy
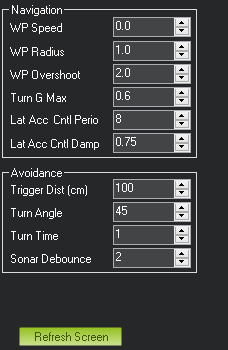
also you mentioned before something about waypoint overshoot etc… what should my settings be?
on MP where the rover is sitting stationary it shows it pretty far off from where it is. anyway to improve positioning? maybe higher gps refresh rate “if there is such a thing”?
As you can see I’ve drawn where the rover actually is and the direction its facing and on MP its showing something different. Any ways to improve this and also improve gps performance without having to buy expensive hardware?
probably not safe to assume google maps is dead right could be the map is not well aligned, or more likely a combination of the map and rover each being abit off, and to be fair to the rover the position it is actually in (if the map is right) is right next to the house with a reduced view of the sky.
No, mine tracks pretty well. You can try 1m for Waypoint overshoot but if you have other fundamental issues it won’t help. GPS update won’t do anything either. Rovers don’t move fast enough for this to be a factor. Leave it at 200ms. Did you at least perform cruise throttle learning?
Even well tuned your expectations for tracking and waypoint accuracy are probably too high. After spending what a month (?) on that vehicle at this point you should be happy with basic navigation.
I’ve done all of randys tuning. Its strange but the rover seems to move direct to the WP at 100% throttle and at 50% wants to swerve slightly. I would have thought with less throttle it would increase stability in following the waypoint more accurately
I did see the QGroundControl uses google earth. is that a better than MP and would that potentially give better accurate views on the map side of things?
What is your cruise speed and throttle set at? This would have been learned during the procedure. The Mission will run at that speed unless you overide it with a WP Speed parameter value.
I will stick with MP as the majority use it and its straight forward enough for me to understand. Also a question regarding some LED’s I have which I would like to add to my rover to see in the dark. where on the pix can I add them to get power? they are the 3 pin plugs the same as rc servo and esc
just stick them in some a spare servo output, I guess its just two wires? ie they dont need any signal, just power. Double check you bec/esc/whatever is powering your servo can supply enough current
That’s not how you do it. Speed should be controllef by either Cruise Speed or WP Speed not limited by throttle max. Cruise speed and throttle are vehicle specific and needs to be right. Control mission speed with the WP Speed parameter. Set max to 100% and re-learn cruise speed/throttle.