Is there any ideal value or range for PID settling time for multirotor with AUW around 7.5kg.
I’m getting around 150 milli seconds in both Roll and Pitch and around 260 milli sec in YAW. which is kind of overdamped according to me, please correct me if im wrong
Correct setting of the notch filter is important. If you’ve got a .bin log to share that will help a lot.
You might want to try the VTOL QuickTune script, then Autotune if required.
1 Like
Sure here im attaching the .bin file where fast attitudes logging enabled.
What size props do you have?
There are some adjustments that should be made to a few of the filter settings.
Your PIDs dont look “wrong” but all copters are very individual and there are many contributing factors.
Vibrations are mostly acceptable, although a little high on the non-isolated IMU, there is a small amount of clipping so anything you can do to reduce vibrations will be benefitial.
Your notch filter is a little out
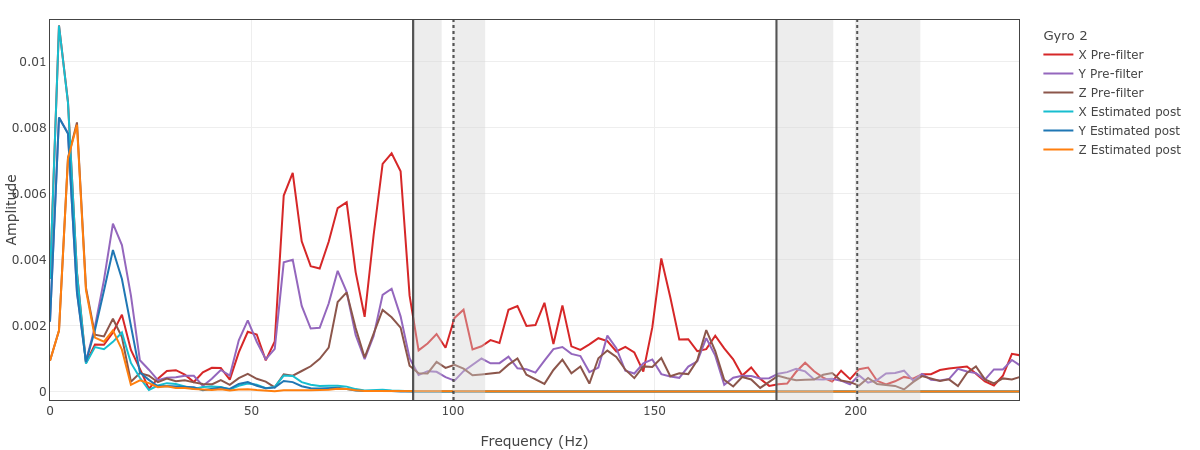
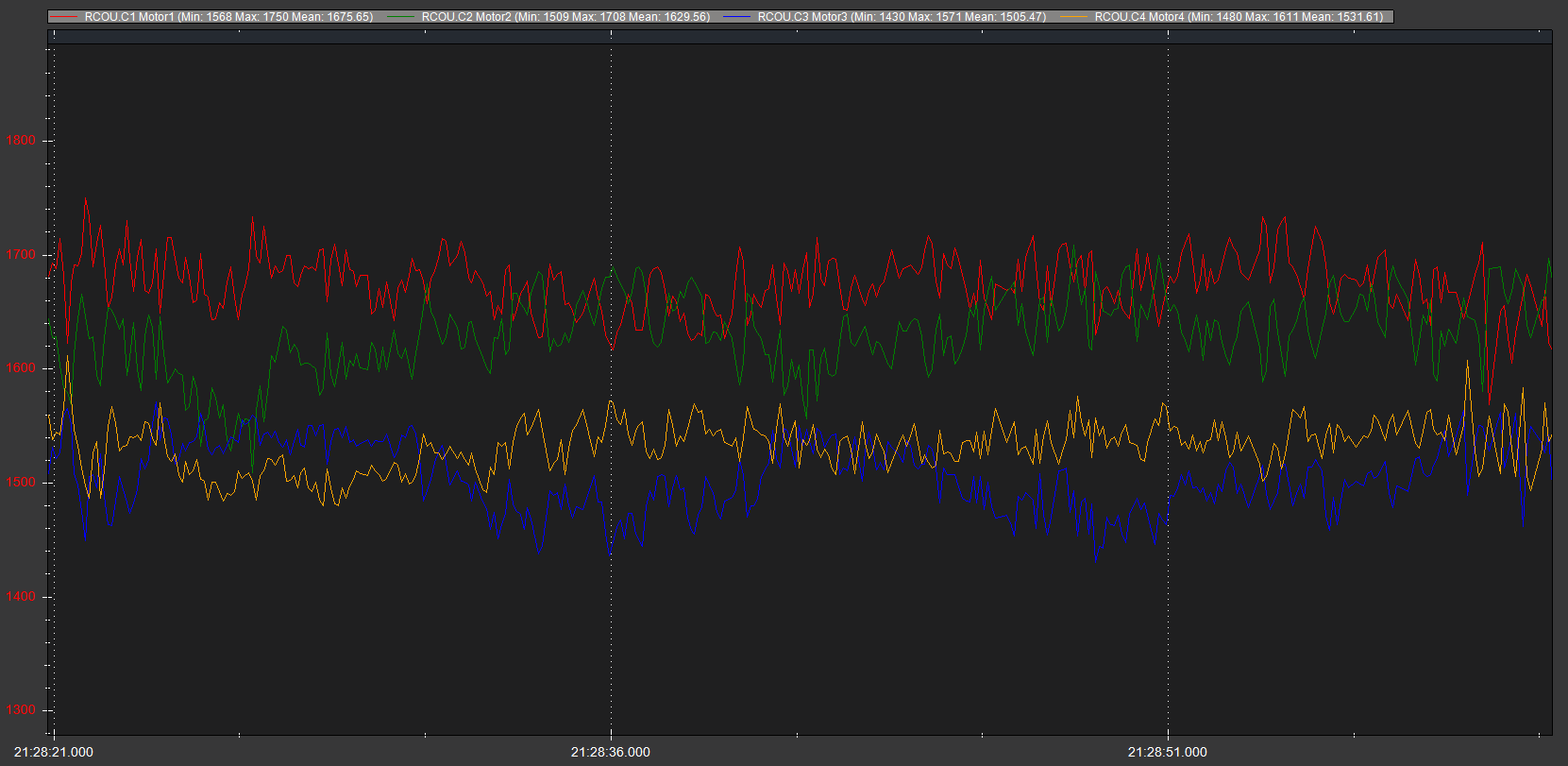
The motor outputs are quite different which causes that spread of noise (in the notch filter graph) instead of a neat peak. Because the motor outputs are grouped by motors 1,2 and 3,4 this indicates a motor mount is twisted. Or the arms or frame is too flexible and twisting.
If you can slightly improve the vibration situation then you can safely set this:
ATC_THR_MIX_MAN,0.5
I would probably reduce these Yaw PIDs and increase the accel max a bit
ATC_RAT_YAW_I,0.080
ATC_RAT_YAW_P,0.80
ATC_ACCEL_Y_MAX,20000
There’s usually no need for these to go over 1.0/0.1
And set these for some general fixes:
BATT_FS_CRT_ACT,1
LOG_BITMASK,180222
PSC_ACCZ_I,0.8
PSC_ACCZ_P,0.4
All the extra logging seems like a good idea, in reality very few people can use it and it just makes the log very big and slow to load and manipulate.
Lastly, set these notch filter values until we see the next test flight data:
INS_HNTC2_ENABLE,0
INS_HNTCH_FREQ,70
INS_HNTCH_BW,30
INS_HNTCH_ATT,40
INS_HNTCH_REF,0.30
INS_HNTCH_FM_RAT,0.70
INS_HNTCH_HMNCS,1
The most important thing is the physical issues → vibrations (if possible) and motor-mount twist.
Without fixing those first, the rest of the parameters wont have their full effect.
Reply with your prop size for some more fine-tuning - the Initial Parameters would have set these correctly.
1 Like
Thanks @xfacta for sure get back to you with updates
@Sagar99 can you test this https://github.com/ArduPilot/MethodicConfigurator/actions/runs/8601520393/artifacts/1394442173 it should help you get a clear idea of the correct sequence of configuration steps.
1 Like
Hats off for your efforts. Thanks once again
There’s more we can do before the next flight if we know this.
1 Like
I’m using 24 inch props
You should use MOT_THST_EXPO,0.74 unless you have TMotor Alpha or Flame ESCs (in which case your MOT_PWM values are wrong)
1 Like