I have multiple MaxBotix I2C sonars, my idea is to use one as obstavcle avoidance on the front and the second one pointing down to measure the high. Each one will work fine alone, but when i plug the sencond to the i2c riel seems like to interfer each other. So I have change the address of one of the sonar, but any address different to the 224 make the sonar stop working on the pix.
Another thing I realize is the PixHacwk 2.1 only get the rngfnd and never the rngfnd2.
Im missing something? Any one did sonmethin similar?
I have not used more than one but I know that one mode they operate in is a free-running mode. The sensors are continuously firing the ultrasonic sensor and taking readings. So, they interfere with each other. The solution is to control when they each fire. The link below is about this, but may not apply to your model: https://www.maxbotix.com/tutorials1/031-using-multiple-ultrasonic-sensors.htm
Thanks, I think this is not the problem, because beside the reading, the P2.1 doesnt recognize the 2second sensor as the rngfnd2, both try to work on rngfnd.
I already have change the address of the maxbotic, and any address different from the original, make the Pix cant read it. May be have to be with your B comment, I will try it today
I really appreciate your help! I´ll let you know the results!
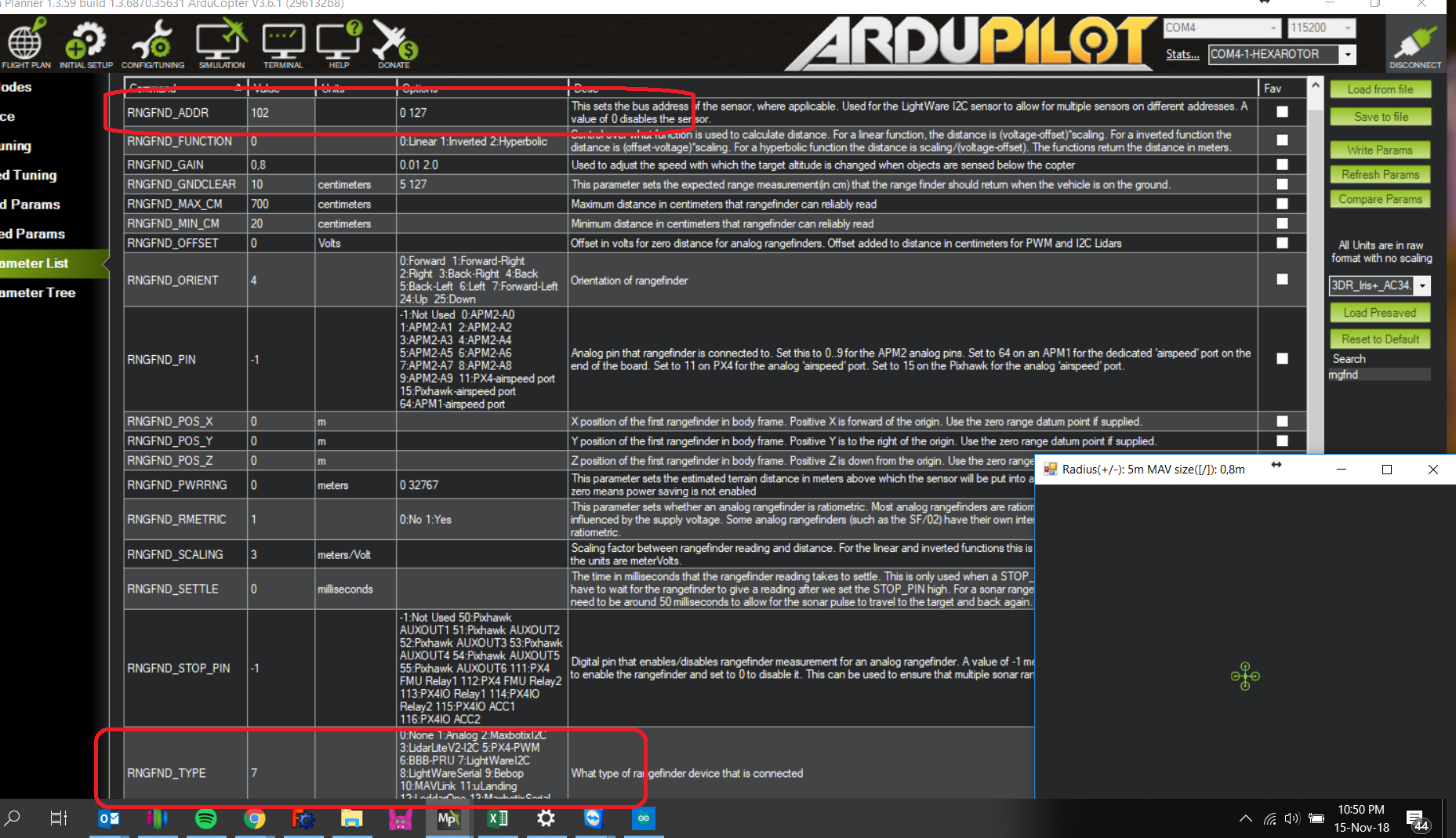
RNGFND_ADDR = 102 (I2C Address of lidar in decimal). Please note that this setting is in decimal and not hexadecimal as shown in the lidar settings screen. The default address is 0x66 which is 102 in decimal.
Did you changed the Adress on the Maxbotic using the arduino sketch ?
Other thing you can do is keeping the maxbotix to original 070x that is 112 on Mission planner (That is what I did for my test)
sorry, im a little confuse with the address. In the arduino sketch the address are decimal, from 2 to 254, just pair numbers.
you have told me about hexadecimal numbers and how to convert. But I dont understan why did you take the 073 for example. the MP address are in hexadecimal?
I think im missing something, but I really dont know. Can you enlight me pls?
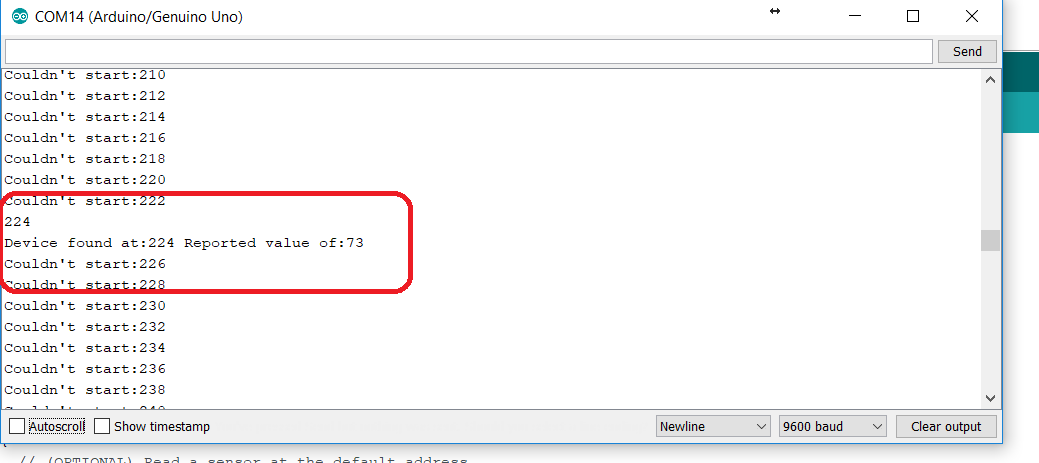
Sorry for confusion , I just took the number showned on the Arduino screen 73…
BAsically if you can read with arduino at adress 70hex, you should be able to read on mission planner at 112 decimal.
Please note I never tried with Maxbotic, I made it work with my I2C TFMINI Maxbotic emulation: