I attache the log file of a flight to show the problem.
I will also do a log with another drone to check the problem replication.
.As discussed, on the first forward flight, the drone will lean to one side in forward flight. After a few turns, then it will be able to fly straight properly. Very annoying especially for a beginner.
Im just tryin to to establishg the cause, so that I can at least give my customers some good feedback and solve the problem.
Now let me explain why I am so frustrated with the ARDUCOPTER system.
I take exactly the same drone, but I put a TAROT ZYX-M gps system into it.
In exactly the same location I do a GPS calibration.
And every time the TAROT ZYX will control the drone in a perfect straight line with no problems. Fantastic.
We moved our component selection to use arducopter, so that we can give our clients more telemetry data whilst flying etc, but so far I am just struggling with getting the drones to fly properly with ARDUCOPTER.
Has anyone here every flown with a TAROT GPS system? or anything similar to a DJI phantom?
The gps mode is rock solid and drone behaves very well compared to that of the LOITER or pos hold in Arducopter.
The atti mode behaves much the same as alt hold in arducpter. In fact ALT hold in ARDUCOPER is very good I think in terms of how it has good control and stability.
I have spent months and hours trying to decipher problems with the drone using Arducopter. Very frustrating,
I really want to get arducopter to work as well as the TAROT GPS system.
Arducopter 3.5.x was a bit sensitive to compass variations, although work had started on making it more bullet proof.
Encountered this a few times where initially after a compass calibration we would get yaw discrepancies that really messed with guided flight behaviour.
I would suggest the first step would be to update to 4.0.3 as a FRESH install, although it will install over your 3.5 OK I have always found it best to go back to square one when there is issues.
Do all the calibrations, follow the new Tuning Wiki and change appropriate parameters, then autotune, and if there is any yaw inconsistency calibrate compass again.
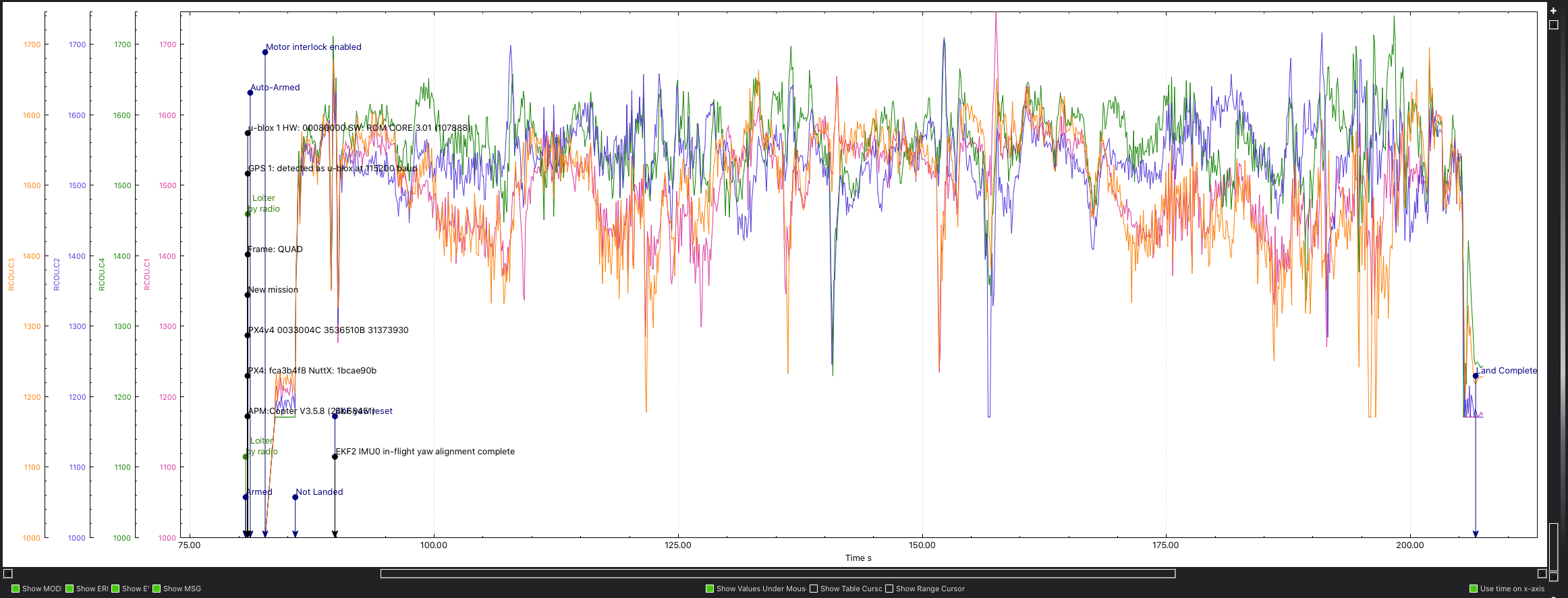
You also have front/back inconsistencies in RCout which is going to mess up pitch behaviour.
Just some minor points that we have had to work out in the past.
I understand your frustration but Arducopter is still the most versatile and configurable autopilot out there although the learning curve can be a bit daunting sometimes
Hi.
Thanks for Valued input.
We changed to Pixhawk 4 by Holybro.
We still have this issue.
I’m thinking it is vibration related.
I’ll send a new log.
Thx.
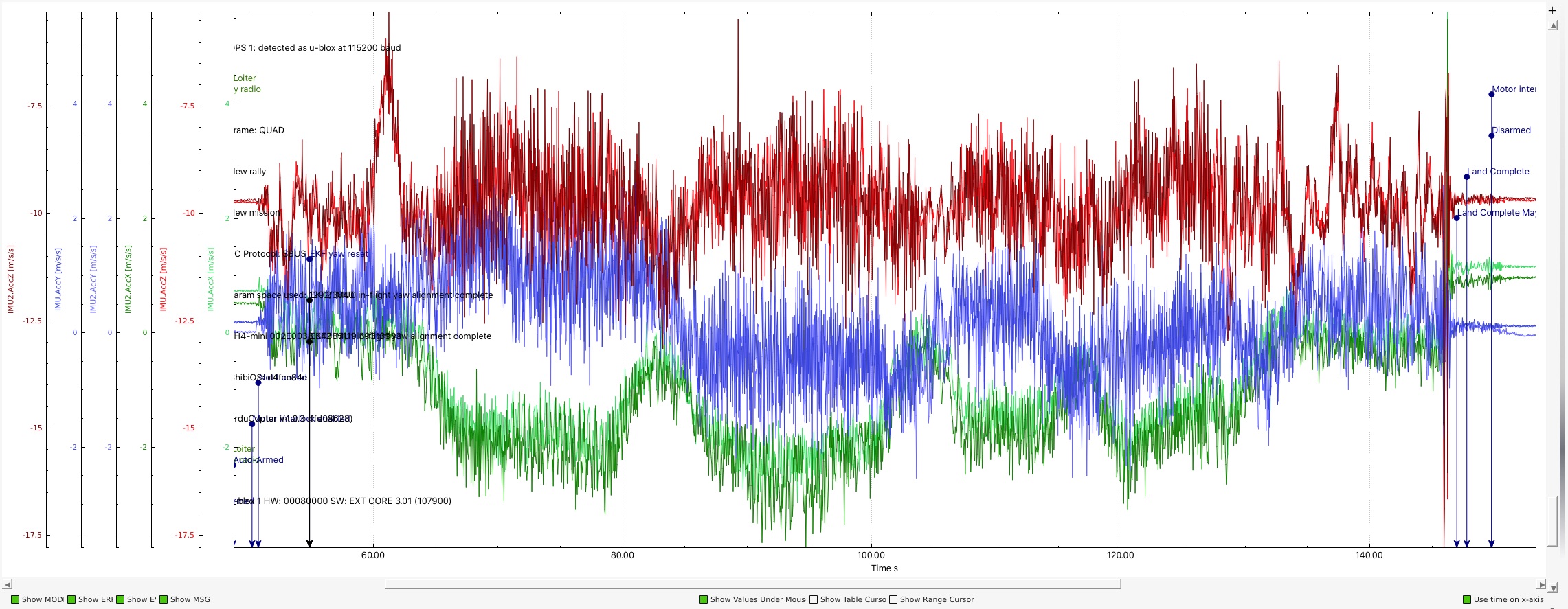
You can see here the clipping which should never happen.
Your FC needs better vibration dampening.
The raw IMU data shows the level of vibration which is going to upset any FC.