default:
// try_send_message must always at some stage return true for
// a message, or we will attempt to infinitely retry the
// message as part of send_message.
// This message will be sent out at the same rate as the
// unknown message, so should be safe.
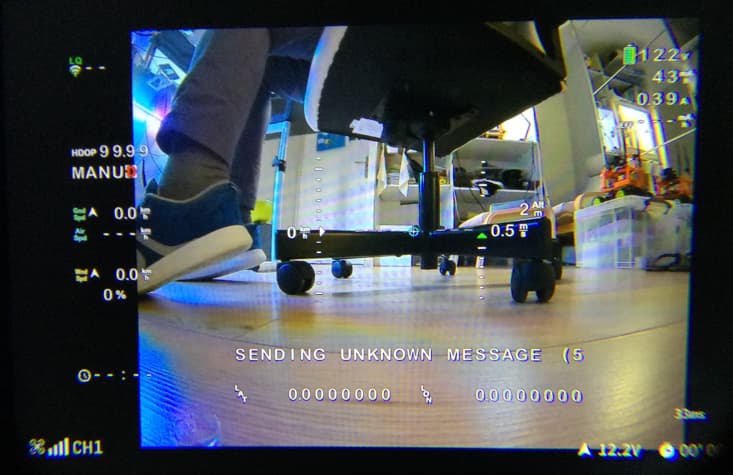
gcs().send_text(MAV_SEVERITY_DEBUG, "Sending unknown message (%u)", id);
Looks like @peterbarker wrote this default block 5yrs ago. The behavior is odd. Why not send an empty string if something “must” be sent?
What also could be happening is one of the other switch cases would usually be triggered, but in v4.3.0 for some reason, it executes the default block.
…but you’re right, I did look at the code myself as well and it’s not easy to infer why sending a particular message failed, about the empt string you might be right or not, perhaps the code dumps all attempts to send a packet without payload
Waoo lot of activity here I install the last HD font and it’s better than before.
I will be happy to understand too why this ‘sending unknow message’ is displayed. It’s like an log level (DEBUG) that must not be there in the custom firmware compilation ?
There is an efficiency metric already for the MSP displayport OSD. OSD1_EFF_EN. For some reason, it measures mAh/km (or mAh/mi) though, instead of the clearly superior wh/km. Of course it is super simple to do (amps * pack voltage) / km/h in the code, but for some reason, they implemented amps / km/h instead . Better than nothing though
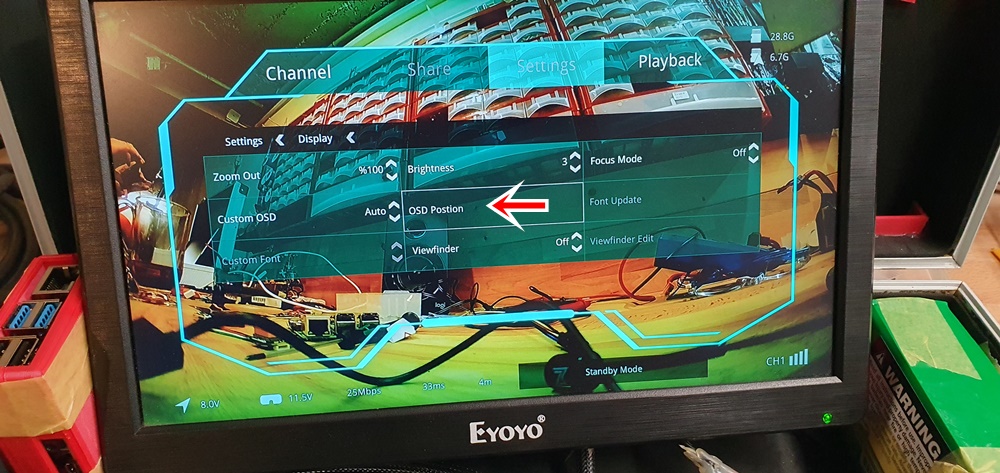
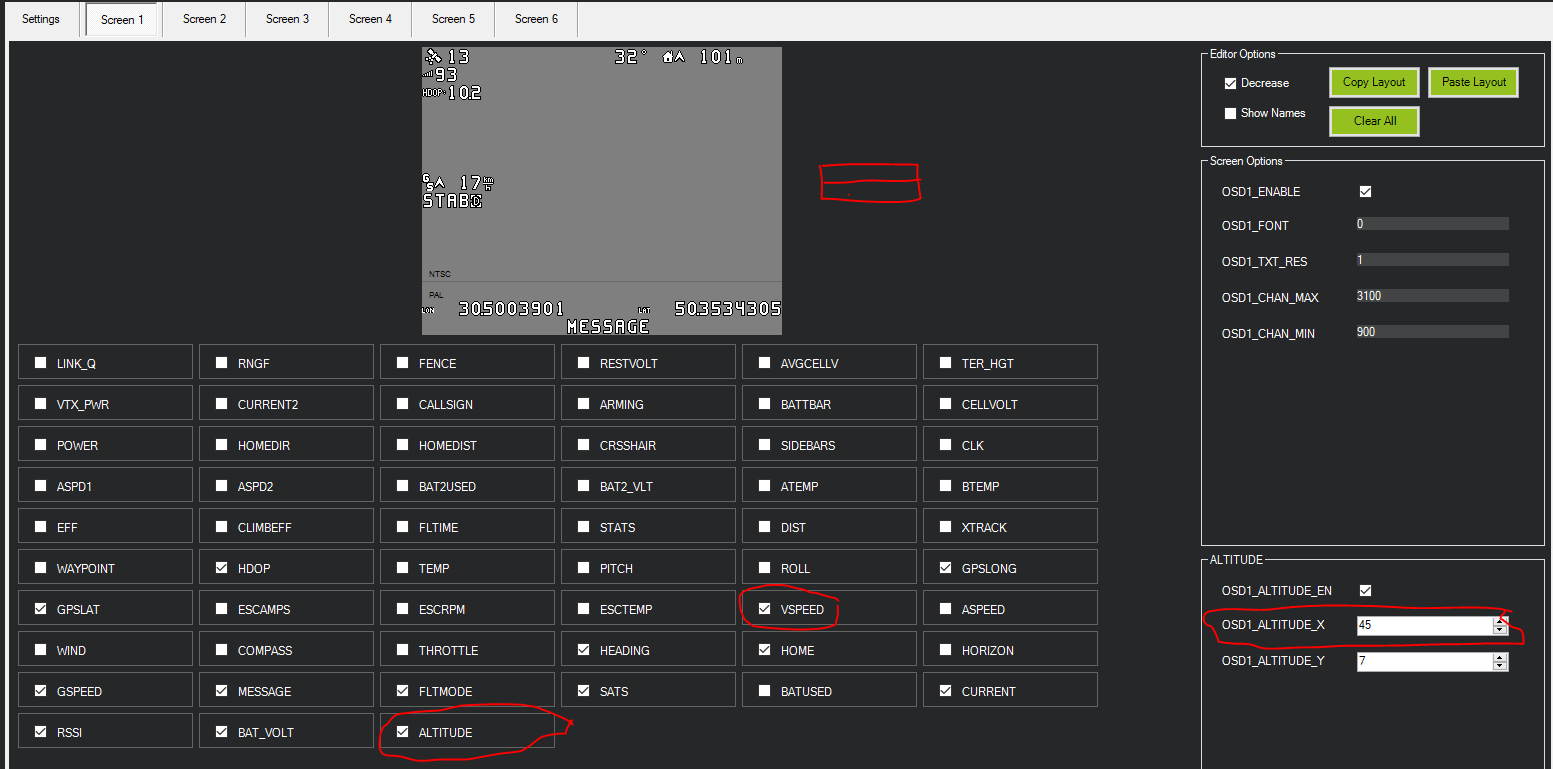
Hi, is there any way to move the HD OSD to the left and increase Y to 20 and x to about 50?
Currently OSD offsets don’t affect anything in HD mode. Running last night’s 4.4dev
I suppose the answer about mAh/km(or mi) was ‘we always done that like this and also this was a standard choice in Eagle Tree system or other ‘classic’ old Autopilot.’
Perhaps there is a way to push a merge request if we find time to do that ? But prior, it will be nice to know if developper had a good reason to choose this and they are agree to change this. I don’t like the idea to fork Ardupilot for such a reason.
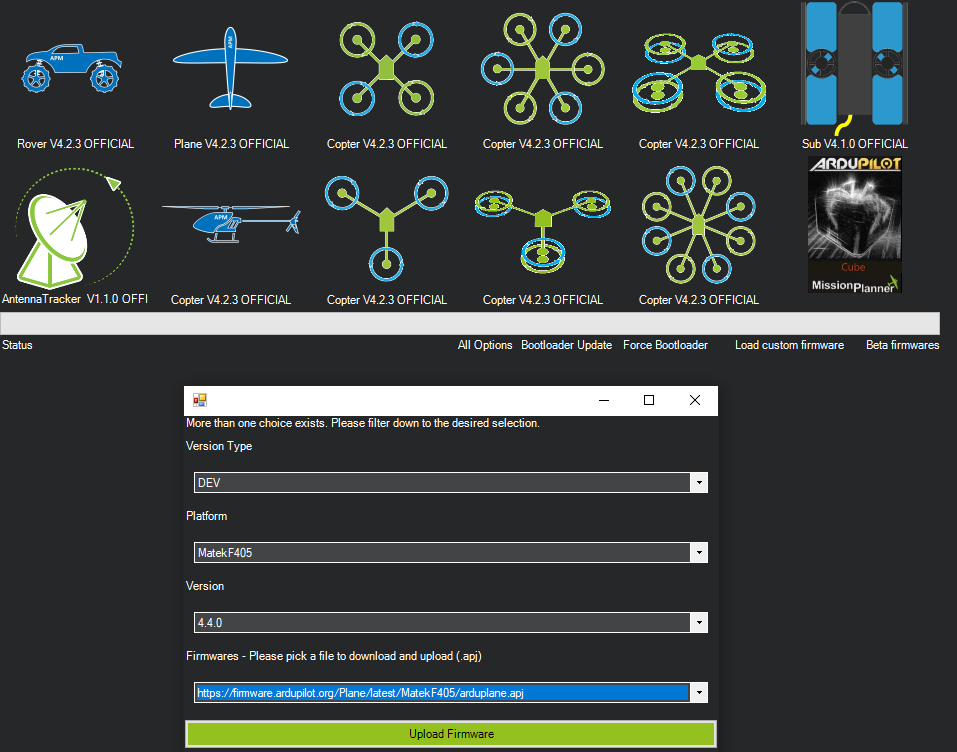
No more ‘Sending unknow message’ with ArduPlane V4.4.0dev (83efcc00). This is a great news. Fun fact I had a custom build launched this morning (12h ago) on custom.ardupilot. that is still in pending. But I discover that ‘all options’ in mission planner firmware page let to choose the version I want Nice
Thanks. Looks like I’ll just use X Y coordinates for now. MP beta updates haven’t addressed this issue. It’s been an issue forever so maybe I’ll submit a ticket to Michael Oborne.
Paul Kaup with STEM+C.
I am interested in joining this MSP protocol group. I am using the Matek F405wmn Flight controller with Arduplane and Missionplanner. Right now I am using analog on my rig, but would like to move over to DJI. Thank you…
The Benett webpage … https://stemplusc.org/the-benett/
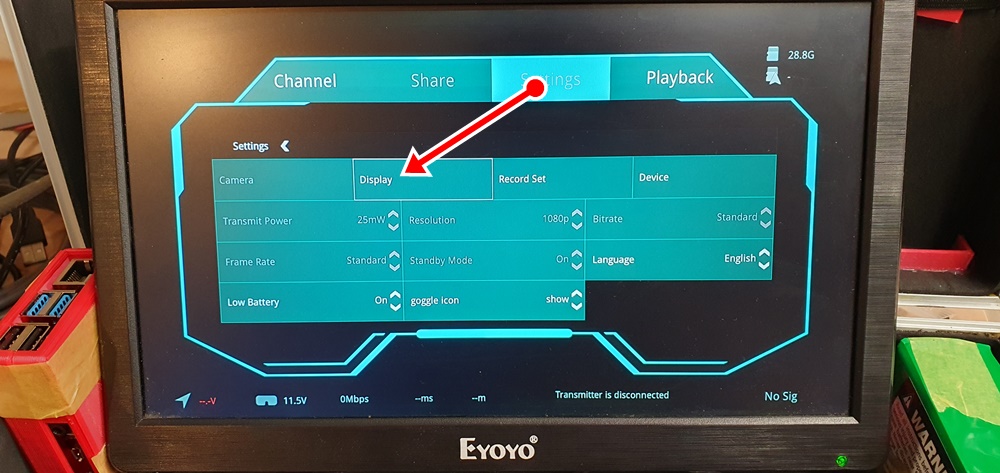
@yaapu I got the Walksnail working on my goggles, but unable to get the OSD text to spread out. It’s more like On-Your-Face OSD. I tried both 4:3 and 16:9 aspect ratio. I can only move the text to the right side but that is all.
Defeats the definition of Canvas mode.
Any idea how I can move the text to the edges of the screen?
Thanks Rolf, works like a charm. @Michael_Oborne I had to move my right edge values to X=45 which makes them disappear from the MP OSD screen. Perhaps in the future MP OSD setup screen should be standardized for 16:9 and 4:3 aspect ratio.
Just a suggestion.