Unfortunately, I currently don’t have the knowledge to build my own version.
Is there an another version available I can use to enable my matek 3901 optical flow
?
I want to go with third tester , recently I was connected to uart 4 and complete all parameters but still my op flow couldn’t recognize
Isn’t working for me what I’m missing can you tell me ?[quote=“yaapu, post:500, topic:57944”]
me know if anybody needs a test build
[/quote]
I’m here to test what ever you need [quote=“yaapu, post:564, topic:57944”]
here you go ArduCopter 4.1dev KakuteF7 custom build with MSP support
[/quote]
After reading 565 messages then guessing , i need to formats on this fw on kakute f7v1.3 , right @yaapu
Is there any reason why i don´t get the Information in my Air Unite / Mission planner,… i mean i have all the newest software and put in the correct numbers i gues
@Deadfox
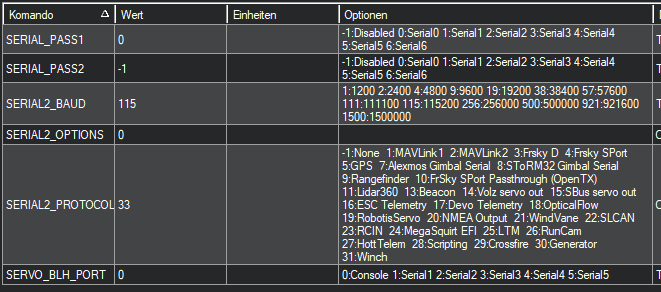
Im using also f405 wing. For me the osd is working with 4.1.0 dev Arduplane (NOT copter) fw. On serial 5 (uart 5) serial5_protocol 33…osd type 3, msp=0
Dont care if you cannot see the given parameter number in missiom planner…i also cannot see protocol 33…just type in and save it. For me it works.
Have you enabled custom OSD to ON in dji goggles?
Hi, I want to use Arduplane and DJI V1 goggles with MSP OSD on a Matek H743 flight controller. I have flashed the H743 “Latest” Dev version (4.1.0 with bl) and now have MSP_OPTIONS=0 and MSP_OSD_CELLS=0 in the parameter list.
By setting OSD_TYPE to 3 and refreshing parameters I was expecting the many MSP_OSD_xxx parameters to become visible. this didn’t happen. There are currently no connections to the board, ie no battery and no serial connections on any UART. I have tried setting different serial ports (UARTS) to SERIAL_x_PROTOCOL=33 and MSP_OPTIONS=0
Should this work? Have I missed something? or isn’t the Dev version of H743 set up for DJI OSD? I have been using, and enjoying, DJI goggles and OSD on an F765 board with MSP_v0.7 for six months thanks to Alex and the Devs.
There are comments earlier here where iamKSK is using MSP on a H743 4.1.0 for optical flow.
I can see that my question was rather short, sorry about that.
I meant to ask if it is possible to show custom information (the reading from a rangefinder) on the OSD by mapping that value to one of the other items (for example vertical speed)? Can this be done by setting parameters in eg. Mission Planner, or would I need to create a fork of ardupilot and change in code what is being sent to the OSD?