Does anyone use the optical flow of 3901-L0X to obtain the horizontal xy axis velocity calculation?
Did MSP protocol make into 4.0.7 Plane FW?
I am trying to get Ocusync Air Unit+Matek F765 to work with DJI RE. Has anyone tested this hardware combo?
What has not worked thus far:
Rx6 to Sbus
G to signal Ground
Tx3 to Rx on the airunit
Rx3 to Tx on the airunit
9v to airunit
G to G
Serial6 = tried 23, 2, 10
baud rate = 57, 115
Interesting observation:
I see flight modes changing in the MP but the main HUD window does not update, not sure what to make of this behavior.
Hi MSP is not supported in stable versions, only master i.e 4.1.dev
MSP is not supported in stable, you need latest master
Approx how long will it take to see msp in stable versions?
If I have 2 AP peripheral devices using MSP can I connect them to the same serial port similar to when they act as UAVCAN devices, or do they require two separate serial ports?
Thanks
Hi all,
Just wanted to report that Matek GNSS M9N-CAN is working in MSP mode with Arduplane Dev 4.1.0 running on Matek F765-Wing.
SERIAL3_PROTOCOL=32 (MSP)
SERIAL3_BAUD = 115
SERIAL3_OPTIONS = 0
GPS TYPE = 19 (MSP)
GND_PROBE_EXT = 4096 (MSP Baro)
GND_PRIMARY = 1 (If you want to use MSP baro as primary baro, otherwise leave as default)
COMPASS_TYPEMASK 0 (make sure MSP bit is not checked)
Notes:
- In addition to MSP, this GPS also supports UAVCAN and I2C communication. For use with MSP, you will want to use the connector with Tx3 and Rx3 pins which are used for MSP communication. (http://www.mateksys.com/?portfolio=m9n-can#tab-id-2)
2.The Matek page for MSP configuration (http://www.mateksys.com/?portfolio=m9n-can#tab-id-6) does not specify the baud rate. From trial and error, I found it should be set to 115,200 bps.
-
The Matek wiring diagram shows only Tx3 on the GPS unit wired to Rx2 on the flight computer (http://www.mateksys.com/?portfolio=m9n-can#tab-id-4), and Rx3 is unwired in that diagram. So, I wasn’t sure if half-duplex communication is needed in SERIALx_OPTIONS for operation with one wire. Instead, I also wired Rx3 on the GPS unit to Tx2 on the flight computer, and set SERIALx_OPTIONS=0. This appears to be working.
-
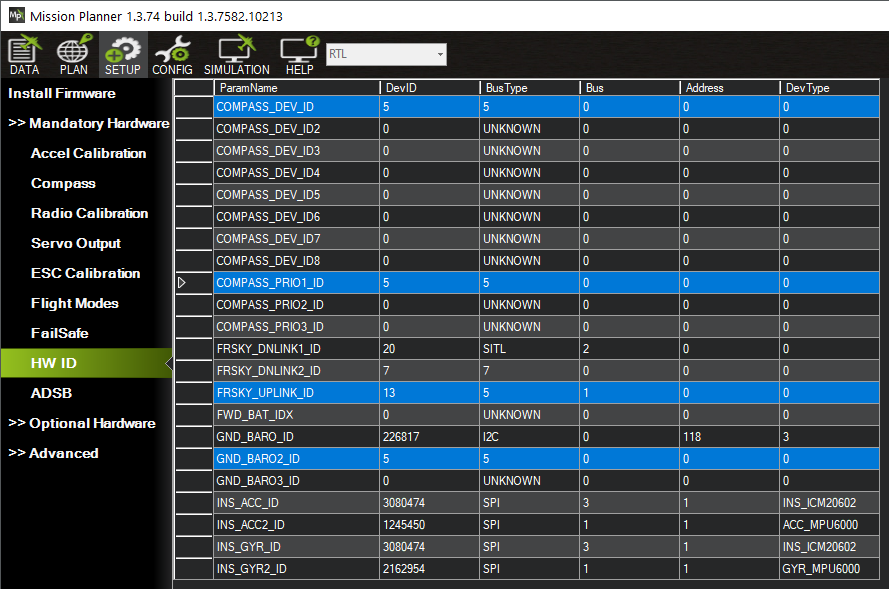
The compass and barometer on the GPS unit are also being received over MSP. All the devices show up as bus type 5 in the Mission Planner HW ID page (see screenshot).
-
Note that DevID 13 is a Frsky R-XSR receiver connected to Tx4 (SERIAL6), which is configured as:
SERIAL6_PROTOCOL=10 (Frsky passthrough for OpenTX)
SERIAL6_OPTIONS=7 (InvertRX, InvertTX, HalfDuplex)
SERIAL6_BAUD=57 (57600)
You must reboot flight computer after changing these settings for them to work. I originally powered the R-XSR receiver using the 9V pins but found that it was power cycling every 10 seconds or so. Problem with the design? The manual claims it supports 3.5 to 10 VDC. It is now on the 5V bus and seems to be working reliably.
- I tried an earlier build of firmware with MSP support added by Alex, but this GPS unit did not work in that earlier version. The above work was done with Arduplane Dev 4.1.0, downloaded using Mission Planner by clicking on “All Options” in the “Install Firmware” page.
I hope this is helpful! Thank you Alex and other contributors for MSP protocol support!
1 Like
Hi, my original code did not support gps and baro, it has later been added by @tridge along support for MSP on AP_Periph
Gotcha. Thank you @tridge.
Question: Would you expect DJI FPV OSD to work with Arduplane Dev 4.1.0?
I just wired it up to the flight computer and it is not working. If I search the parameter list in Mission Planner on “msp_osd” I only get one item (MSP_OSD_NCELLS), so I am guessing this Dev build does not have DJI FPV OSD support.
So… do you happen to know if there is a build that has both the GPS and Baro and the DJI FPV support?
I’m guessing if I clone the AP_Periph-1.0 branch that should have both? I’ll give that a shot.
Thanks to you both.
Regards,
Brian
yes, if this is a recent build and it is enabled in the fw build for your board
What board are you using?
Thanks @tridge. Great to know that DJU FPV OSD should work with Arduplane Dev 4.1.0.
We are using the Matek F765-Wing for this testing. We also have Matek H743-Wing, and Matek H743-SLIM.
It could be that I didn’t do the git clone correctly. Could you tell me how to clone Arduplane Dev 4.1.0? (I don’t see it under branches of the master. Sorry for being a noob. We are developing drones for electricity generation and aspire to become contributors.)
It sounds like DJI FPV OSD also needs to be enabled in the firmware for the builds. If there is another hardware target that has both enabled, let me know and I can study it.
The OSD is not working on the DJI FPV headset. I reverted to @yaapu release (MatekF765-Wing_msp_0.7) and can confirm that I have the DJI camera unit wired correctly since DJI FPV OSD works. (The MSP airspeed sensor also works, but GPS does not.)
Also wondering what the setting should be for the serial port in latest build. Previously, it was “SERIAL5=30” but I’m guessing now it should be “SERIAL5=33” to match the options help description?
Salud,
Brian
Is there a way to see if MSP is enabled in a specific board’s firmware from the arduplane download site? I have three different boards I could use but not sure if MSP is enabled by default in any of the dev branches for them.
Omnibusf4pro, matek f405, matek f405 wing.
It’s enabled on all boards that have integrated analog OSD.
The three boards you listed all have built in OSD so MSP is enabled as default on all of them.
Hi Brian,
all those boards have MSP enabled by default, you can simply download the latest master build from the build servers.
You need to set
SERIAL_PROTOCOL = 33
OSD_TYPE=3
MSP_OPTIONS = 0
and load the example params here
You can get more info in the wiki
MSP OSD support is now builtin to most boards by default after a change that I merged yesterday. This should make it easier for users to test this feature by loading the latest firmware.
2 Likes
This is my first Ardupilot build, with F765 Wing, wanting to set up an OSD in the DJI goggles. Running V4.0.7. Am I correct that I have to run a Dev version to view the OSD?
Yes, MSP requires 4.1 dev (current master)
Thanks. I’m not familiar with AP - can I fly confidently with 4.1DEV? I no longer fly analogue.
A small number of people do fly 4.1-dev (aka github master) on a daily basis, but nobody can guarantee you that it will work fine in your vehicle. 4.1-DEV has not yet been beta tested by our massive user base.
Sorry… , but this is your decision, and your responsibility.
Thanks. Back to iNav then, I guess. Don’t want to risk a plane with my first Arduplane build.