Hi, no that’s about all the sensor is sending via MSP
so this is not working in the chopper 4.0.5 ?
Dear Alex,
first of all thank you very much for your work!
I have a problem with the following command:
sim_vehicle.py -v ArduPlane --console --osdmsp
The task stops with:
…/…/libraries/AP_OSD/AP_OSD_ParamScreen.cpp:707:35: error: no ‘void AP_OSD_ParamScreen::draw()’ member function declared in class ‘AP_OSD_ParamScreen’
void AP_OSD_ParamScreen::draw(void)
^
compilation terminated due to -Wfatal-errors.
Do you have any ideas what I can do to get the sim up und running?
Joerg
Hi Colin, no it’s not included in stable releases yet
this is a bug, an #ifdef was missing, check this PR
1 Like
is there i test version for a black cube ?
i and only get it to work on a pixhawk 1
Hi Colin,
MSP it’s not enabled by default on non OSD boards, they will eventually be supported (a PR is pending to enable MSP on all boards), you can build it yourself by appending --osd to the configure step
./waf configure --board CubeBlack --osd
arducopter_cubeblack_master_msp.zip (971.8 KB)
arduplane_cubeblack_master_msp.zip (973.0 KB)
Thank you, I also want to know whether the x and y obtained are the angular velocity or the linear velocity in the corresponding direction?
Hi Alex,
could you please update the builds for Matek F405-Wing, F765-Wing and H743 to the current master level?
Reinhard MSP has been in master for a while now, I made a couple builds because the MSP feature is disabled by default on boards that do not have an integrated OSD.
The Matek boards you mention though do have MSP enabled on current master builds.
Hi Alex, danke!
I’m already looking for an overview with the features included in each case … sometimes you already lose the overview … 
1 Like
Does anyone know what the OPTICAL FLOW scan frequency of 3901-L0X is?
This is going to test the limits of my ability, and probably the limits some of your patients.
My Matek 3901-L0X arrived today and as long as i have no other disasters with this quad I’ll be installing it on Matek F405-CTR board running copter.
My plan is to connect it to serial 4 (TX/RX 5). Am i correct that I’ll need to run Copter 4.1.0-dev? Or is there a different version I’ll need to run? I’m currently on 4.0.5.
I know you were looking for feedback on the 3901. Is there anything in particular you are looking to find out or that I should watch for as I fumble my way through this?
Thanks!
Hi, yes you need 4.1dev i.e. current master for MSP support.
The feedback I’m looking for is: does it work at all on your setup by following the ardupilot opflow wiki? ![]()
Winter is setting in here so progress will be slow. I don’t think optical flow sensors work well over snow. But I’ll keep you posted. If I can get it to work then your development should be pretty much bullet proof. 
1 Like
Someone pointed out on the rcgroups thread that iNav is using the craft name field to display custom data in the OSD (warning, distance traveled, etc). It might be another field you can use to show more data.
Or maybe that’s the field you are using and I’m just not aware
Yep, already using it 
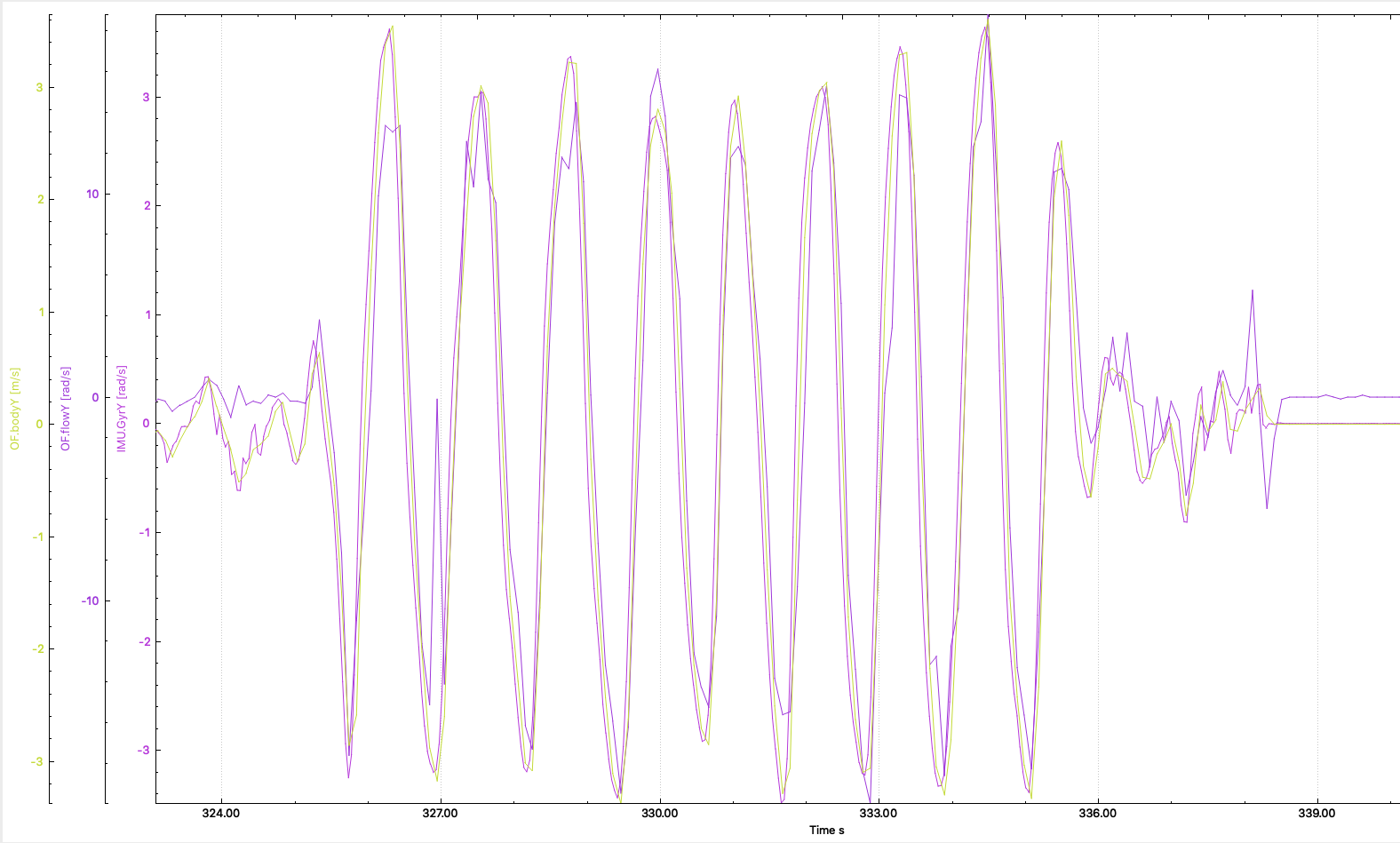
So far so good: Ranger finder seems to be working. Optical flow is functional, however calibration is needed. If I’m reading the the logs correctly I don’t see any need to adjust orientation or position variables.
Can someone confirm for me: even though OF.body is m/s and OF.flow is rad/s, the FLOW_F?SCALER needs to be adjusted till they correlate? The fact that they’re different units has me all messed up.
Thanks!
1 Like
Hey Alex,
I was going through and found where you mentioned no throttle and no heading. I guess in my opinion these are two of the more important factors, especially heading. I like seeing the throttle just for ease of logging new setups (i.e. X% throttle is Y airspeed and Z amps nicely recorded on screen). I believe you have fully utilized all of the available parameters DJI supports?
Would it be possible to overload a couple parameters and let the user select which they prefer? I would use throttle/heading over PWR, WIND, and RTC anytime.
Hi Alex, I am using kakuteF7. Since I don’t know ek3 in ardupilot 4.1.0, I couldn’t use it. In version 4.0.5, I could not find the matek optical flow sensor, although I selected all the options correctly. If ardupilot * .hex compiled for Kakutef7 is available, I would appreciate it if you can send it by mail. I am grateful for all your help. best regards.