Because the Ardupilot community asked for it. Here’s the new mRo Pixracer Pro with tons of functionalities.
4 years after the original mRo Pixracer was designed and proven mRobotics recognized the need to bring the design to the forefront of open source flight controllers.
With the mRo Pixracer Pro mRobotics maintained everything that the community loved about the original mRo Pixracer and improved every deficiency that was known. The resulting fight controller is destined to become the new goto flight controller for developers and a rock solid foundation for commercial and industrial systems.
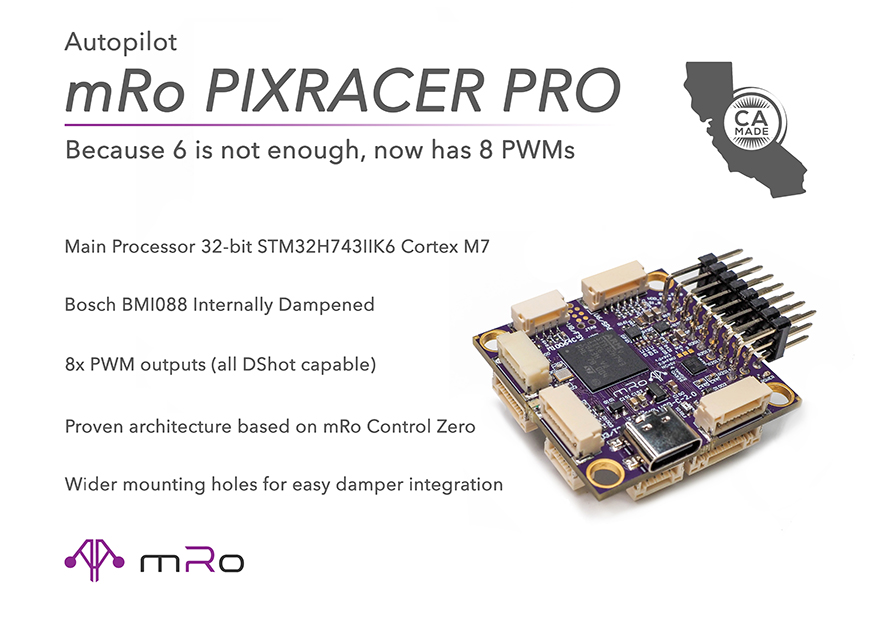
Check out all the specs:
Main Processor: 32-bit STM32H743IIK6 Cortex M7 RISC core with FPU 460 MHz IO Processor: No RAM: 1024 KB RAM Flash: 2 MB FRAM Crypto / Hash Processor: No Accelerometers / Gyros / Mags: Yes Sensors:
Invensense/TDK ICM-20602 (6DOF)
Invensense/TDK ICM-20948 (9DOF)
I’ve done a test fly with this new board…, the fly was smooth and stable.
During the fly i don’t have saw too much spikes due barometric change.
The dual CAN BUS ports give you a good option if you need can applications…you can connect directly a can periph or with a can node you can convert an i2c or UART periph into a CAN periph.
The form factor of the board is good, and it can be use in medium of big frames.
Hey Dave.
Ya I did some more reading and found the info on the buzzer. Thats not a big deal for me.
But I don’t get how the safety switch is implemented via Can. How is it wired up, I assume a can adapter is needed but I have never seen a switch connection on them
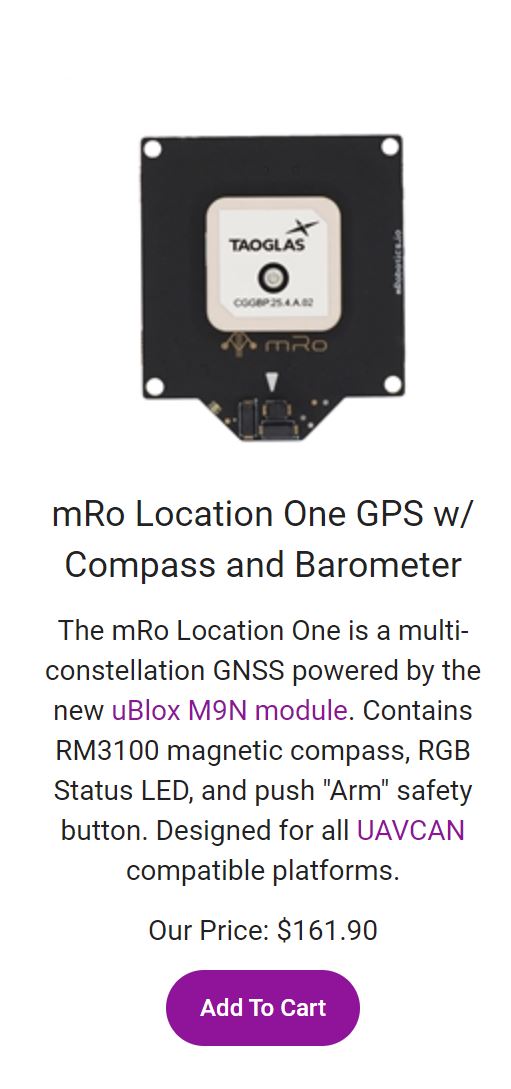
I really like this board and have a few of them there is a small speaker on the board like the zero and it will arm by software after you place it level and not move it as well as what Dave said.
I see so there is no ability to connect a safety switch to a can adapter or kitcan. Just leverage whats on the GPS in this case the Location one.
Ok well I am not putting this gps on my hexa and the quad that has one has a canopy so no access to the switch. Not a big deal, I just want to make sure I do this upgrade right.
I use Dshot and so I believe it just calibrates so I don’t’ need to worry.
I assume you don’t mean the machine is ARMed and ready to fly. Rather is in a config passed state and ready to be armed with the down and right stick movement.
Not needed to change the arm configs prams just plug in the battery and place it on the ground. however if the bird is moving around as you plug the battery in mine does not arm as far as i know.
Yea, I don’t use them either. When one of the previous Dev’s made the comment that it didn’t make any sense to reach thru props to press the “enable props to spin” switch it resonated with me. Sure, I know the GPS mounted switches are usually out of harms way but I still don’t see the point.
Ok thanks all.
I will just config the machine with no switch on the pixracer pros and the ones with regular pixracer I can keep the switch.
I will need to fill the hole on one canopy that no longer needs a safety switch but thats not the end of the world.