I have an idea for that ![]()

1 Like
hahahahahahahah
Thats perfect.
but I think I will use body filler. lol
Sorry to revive that one again but I have two questions regd the pixracer pro:
- is it possible to have two 5.3V supplies attached? I just see one power input but I assume second can be via servo rail?
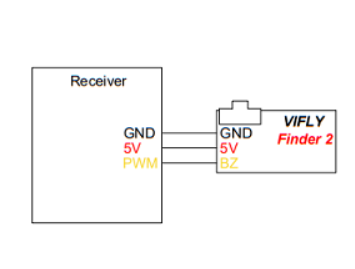
- I know it has a built in buzzer but how do I attach a battery backed buzzer like the ViFly?
Thanks,
Axel
Are you referring to this buzzer
Just connect it to your receiver like in the documentation.
AS for dual power. I would need to check but I don’t think you can feed the pro via the Servo rail.
If your looking for redundant power there are ways to address that
You can use a device like this multiplexer. This little board takes 2 5.3 volt inputs and if one fails it will switch to the other. It has a max of 2 amps which is sufficient for the flight controller.
You can also use a schottky diode as well.

1 Like
No. The servo rail is isolated.
1 Like
Thanks a lot @rickyg32,
the Ti MUX is a good idea, will give it a try, I suppose that’s the same device built into the Cube for power switching.
As for the ViFly Finder2, it should do the following things:
- signal states of the quad (ok, can now be done by the built-in buzzer)
- sound on demand (i.e. if a switch is flipped on the RC)
- sound on total power loss
As my receiver is a Futaba R3001SB having only two out’s and the second being SBUS2, not sure if it works and how to set it up regd the 2nd point. However, I’ll try to connect it to the servo rail, assign the RC switch / function “buzzer” to RC_IN / SERVO_OUT.
Cheers,
Axel
Ah yes I get what your trying to do with the buzzer.
I have no idea how to do that as I wanted a separate buzzer myself.
Got the buzzer internal + ViFly working on the Pixracer Pro:
- connect ViFly to output 8
- set RC8_OPTION to „Lost Copter Sound“
- set SERVO8_FUNCTION to 1 (RC PassThru)
This buzzers internally and the ViFly when switch on transmitter is used. If battery is removed, ViFly starts buzzing as expected.
Oh cool
Thanks for sharing that.
For those using Pixracer Pro, how are you mounting it? With the older PixRacer R15 I have always used the old 3DR foam blocks that came with the Pixhawk (I had a stash of them sitting around). I use a printed mount that the PixRacer screws into, and the foam blocks between the printed mount and the frame. This has worked pretty well for 5" to 15" copters, in all but the harshest vibration environments.
On the PixRacer Pro, they have the Bosch IMU with internal vibration dampening, and they ship with rubber bobbins, like a lot of racing flight controllers. I’m curious if the combination of the rubber bobbins and the Bosch IMU is sufficient, or are people having to add additional vibration isolation?
It would definitely make things easier if I could just screw the PixRacer into the frame, and those 3DR foam blocks are really getting scarce and expensive, particularly for a single use item.
Hi, I mount using the plastic standoffs 1/4 after removing all the grommet. so I hard mount.
Thanks for the feedback. What sort of airframe was that, and how is it flown? I tried mounting the PixRacer R15 using elastomer M3 standoffs, and the copters hovered and performed slow cruise flight just fine, but higher-speed flight was a problem. In foamy fixed-wing airframes, the same standoffs work fine.

This is open-source right?
where can I find the schematics to this pixracer pro??
Do you see it on the list?
Autopilots
Inquire on their Discord channel, I’m sure they will share no schematics.
Its in the list of closed hardware.
I suppose I didn’t understood the english properly!
open hardware is built on an open source base while closed hardware not.
So the manufactures of open hardware are supporting customers with more or all information about the board on request. The manufactures of closed hardware keep this information more restricted.only delivering necessary information to use the board.
1 Like