Once eliminated in MP tracker the proximity considerations (<5) to tracker home, causing AZtoMAV/ELtoMAV discontinuities, here are shown other discontinuities while in a quad real flight, happening strangely at some mode changes.
Exposed first here: camera itself detects fast panning when discontinuities happen.
What seems best is to have AZtoMAV/ELtoMAV angles sent to servos while in GPS lock. This would permit adjusting tracker position and servo offsets before flight.
Discontinuities will be shown on this video (tlog capture down right). The tlog capture is this other video:
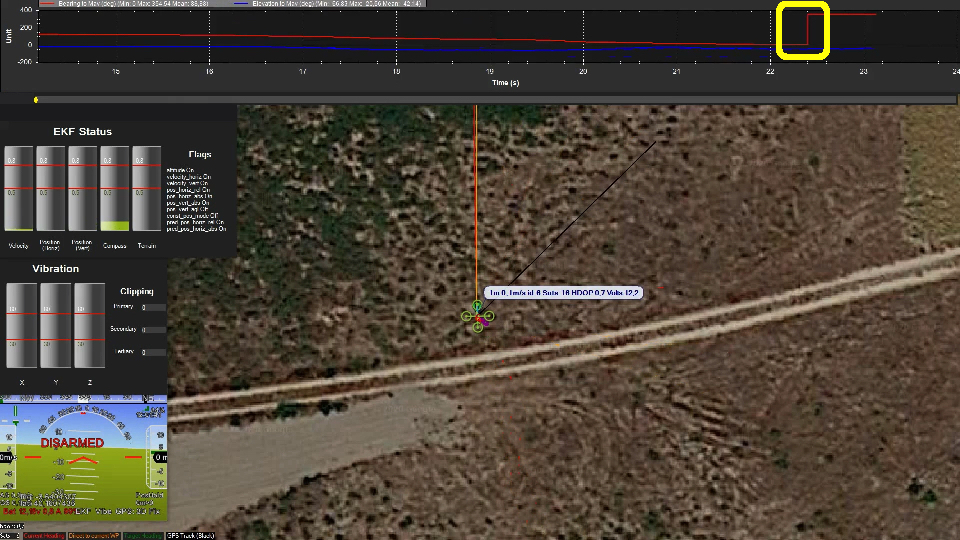
Discontinuity before video starts:
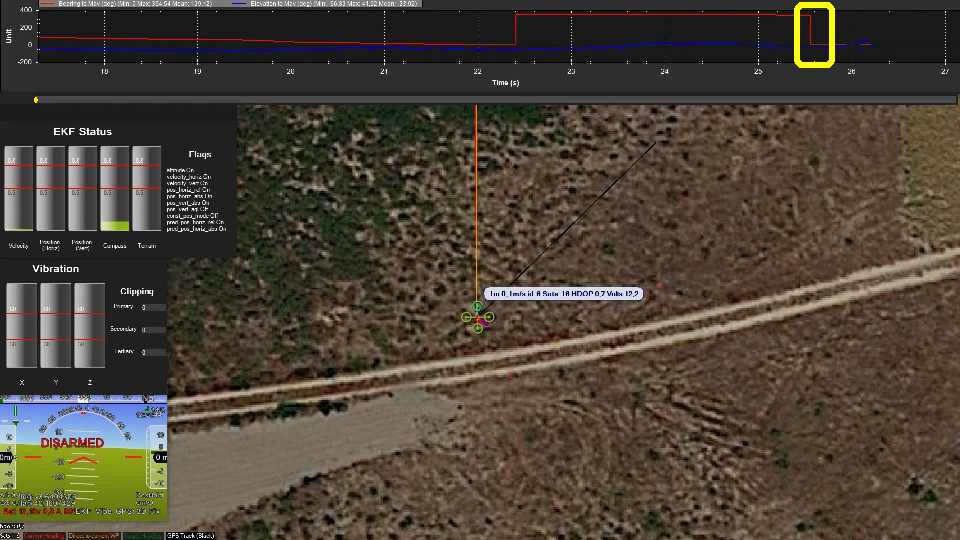
Discontinuity after video starts:
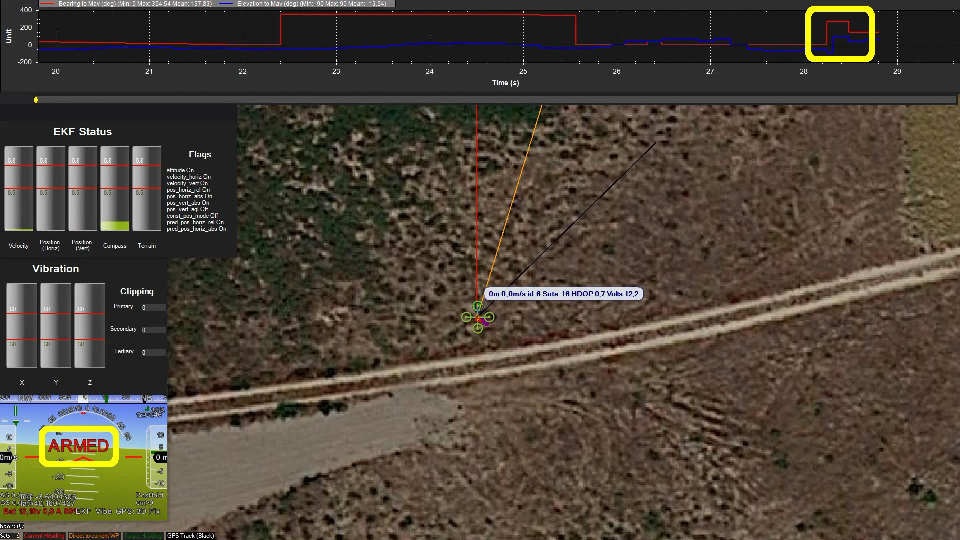
Discontinuity when armed:
No discontinuity when mode is changed to Auto
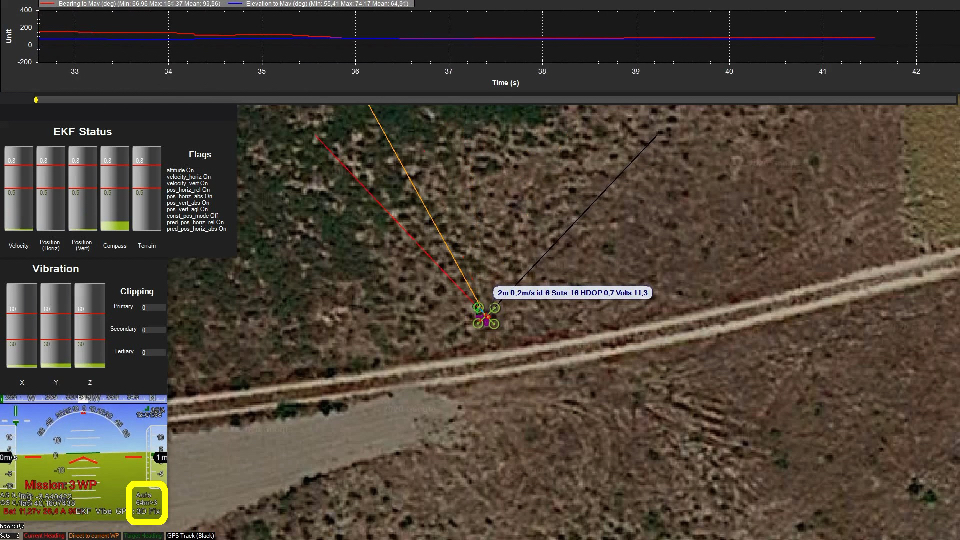
but there is one a bit later when going to first way point:
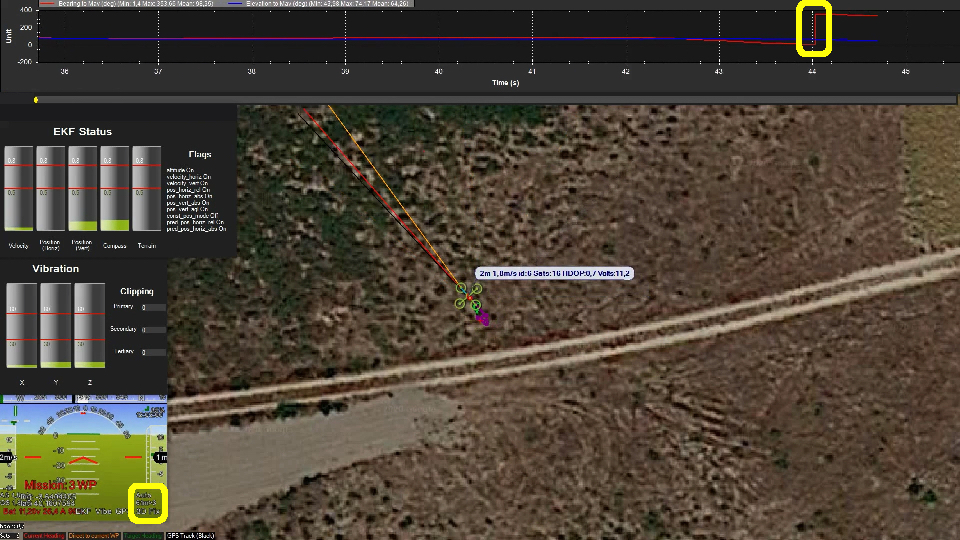
From this moment the camera is pointed correctly (final servos displacement is heard at that instant (tracker up right)).
All problems would go away if angles are sent once GPS lock is achieved, and while it lasts, no matter armed or not, and no matter mode changes.