Hi.
This is a 4K video of three quads flying simultaneously the same GPS mission, including MP tlog captures:
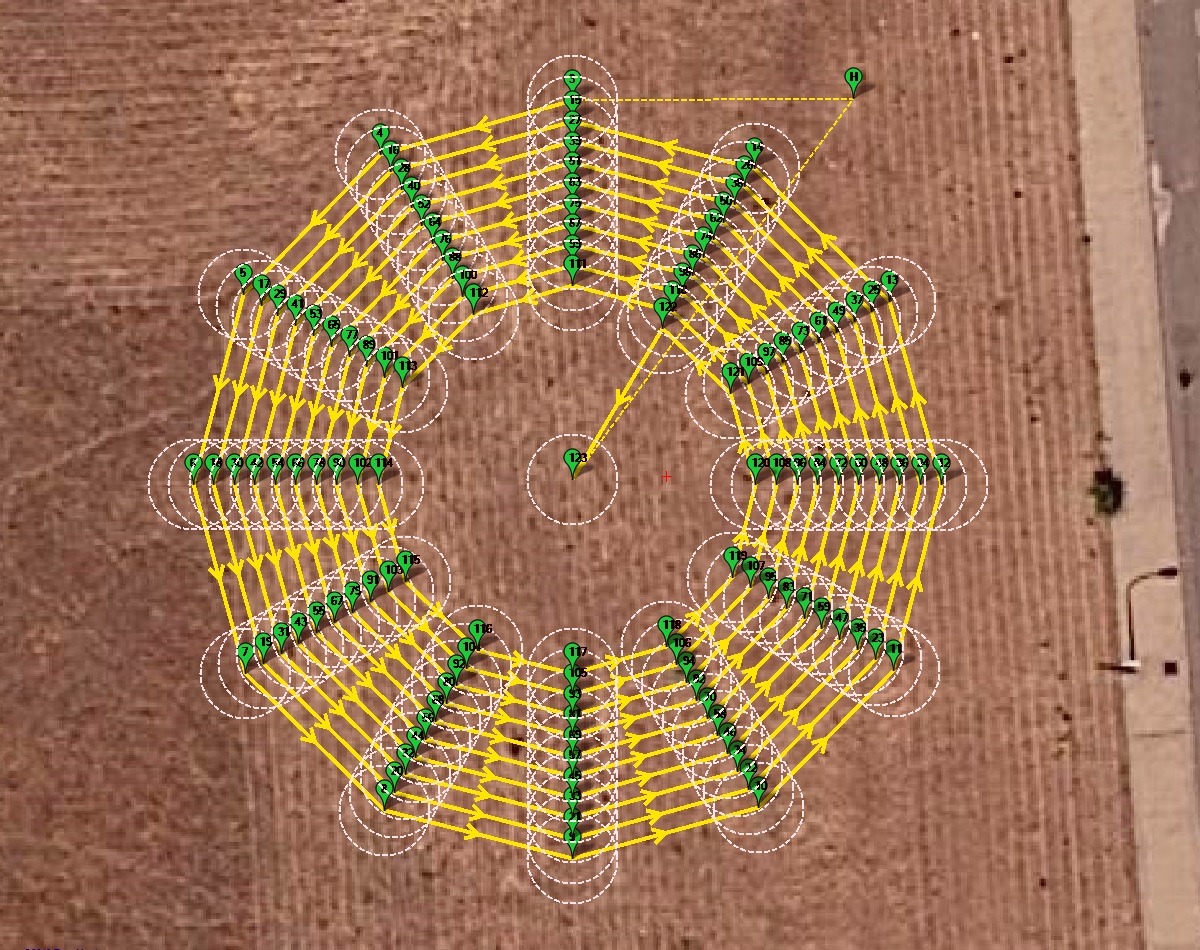
This is the mission:
Communication laptop-drones is through three pairs of 3DR radios. The laptop executes three instances of MP, so that the communications are stablished simultaneously. Each dron has a different SYSID_THISMAV.
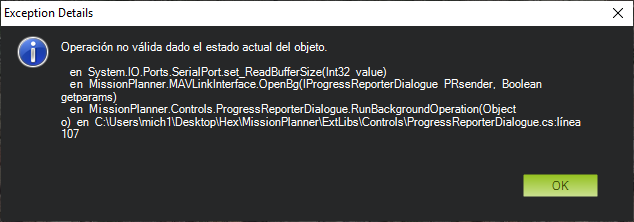
However, right clicking on the upper part of MP window appears “Connection List”, asking for a file, but it is a mystery to me how this option is used. This has been asked before:
Connection List Problem
Can this “Connection List” be used for stablishing the connections with the three drones simultaneously?
How? File syntax?
With such “Connection List” working, and as with three MP instances:
-will three speeches be heard?
-will three .tlog files appear?
The three speeches at the tlog captures and on the video are nice, but it is difficult to distinguish to which dron each voice refers. Since the voice is standard, this could be improved choosing a different voice for each of the connections, perhaps incorporating this selection in the mysterious “Connection List” file. Also, adjusting the speech speed would be nice.
When using more than one 3DR radio pair, communication errors appear, which use to last 20 to 30 seconds. This can be heard on the speeches, a red X appears on the hud, and the purple trace on the MP tlog capture joins points with straights.
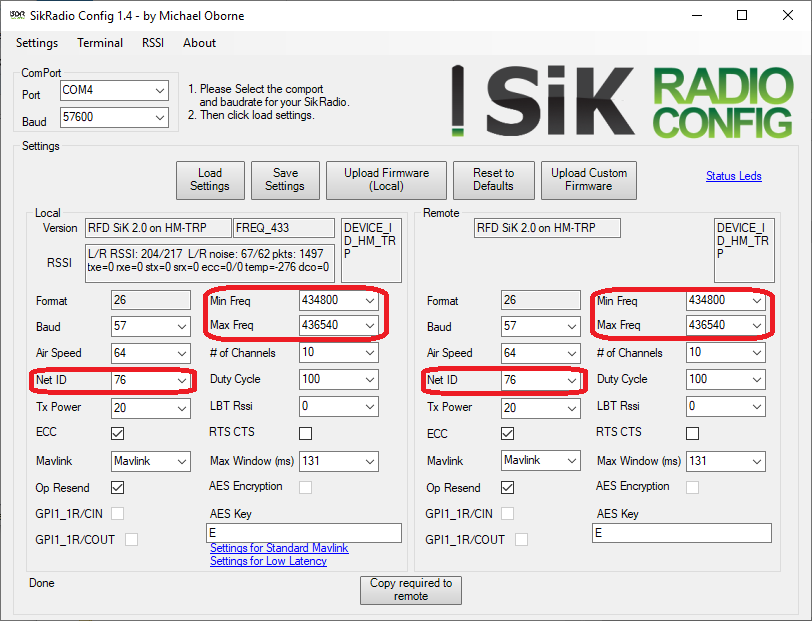
This is a pair of the three pairs of 3DR radios used: I change ID and min/max frecuencies on each pair, but still there are communication failures. The 3DR antennas are maintained vertical (parallel). Can all this be improved?
Would ESP8266 wifi telemetry give better results than 3DR radios?
This is a similar 4K video with a rover and two drones:
I wonder why there appears the SYSID_THISMAV on the rover tlog capture following it, which is nice, but not for the drones. Is this configurable?
Thanks for any help or aditional suggestions.