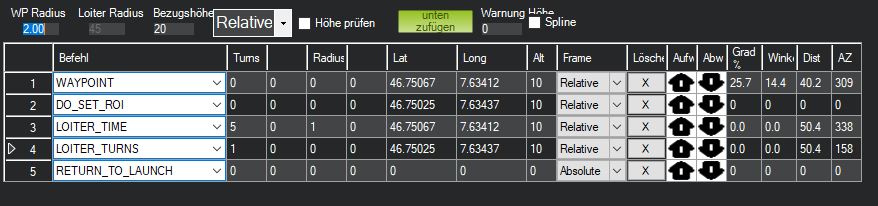
When i use the MP Simulator to do a Loiter Turn with a multicopter, the copter is not turning around the ROI with the sepcified radius (Loiter_Radius: 5000cm), it heads to the ROI position and start turning (Yawing) around.
Is this a known bug of the simulator or is something wrong with my wp file? In real, it works ok.