After starting MP, I then select Sim. When this is done is there a generic flight model automatically loaded into the computer that STIL works with? If so, then how would I start a simulation? I have clicked many buttons but the initial drone icon never moves. Basicall, I am asking how do I use the simulator?
You can run an Auto Mission with nothing else needed from the Actions Menu. Otherwise you will need some control input. Some Transmitters will work as a USB Joystick or you can use a Game Controller.
I have a game controller. As I recall, I think it was discovered when I plugged it in. So what do I do to start some sort of simulation. What is the magic button?
I noticed that if I right click on the video, I get a drop down menu where I can select “fly to here” but nothing happens.
Well no. 1st you have to Arm and take-off… What are you trying to accomplish with the simulator?
There is no Magic Button. Use your game controller and configure it. Setup>Joystick
What RC Transmitter do you have?
I found the ARM option and the takeoff as I recall. I have a game controller that is detected and I can see movement when I move the joy sticks. When I select ARM, is says ARMED but the it reverts back to Disarm in a few seconds.
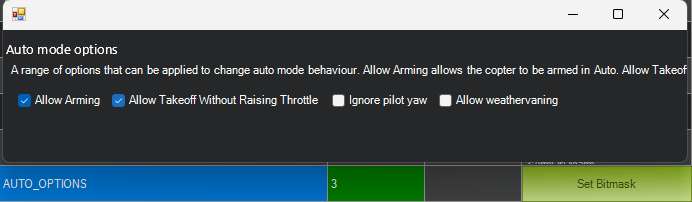
I must be really dumb. Where are the AUTO_OPTIONS? I am running in the blind. Is there some documentation about this? Maybe I should read the manual in more detail.
All of the configurable parameters are in the CONFIG/Full Parameter List tab.
Here’s some more detail on gamepad setup, which indeed should get you to the point of taking off in STABILIZE, ACRO, ALTITUDE HOLD, or LOITER modes (among a few others). Joystick/Gamepad — Copter documentation (ardupilot.org)
Seems as if you downloaded Mission Planner and just expected to use it with no knowledge of ArduPilot (which isn’t necessarily bad, but you’ve got some reading ahead of you). The wiki is a good place to start. Introducing Copter — Copter documentation (ardupilot.org)
Believe me. I have been reading the ArduPilot documentation until I fall out of my chair. I am totally impressed with this system. I think my problem is that I am jumping around so much that I don’t get the details.I know what I want to do but I am having trouble navigating the MP/SITL windows. They are not intuitive, at least for me. I did just go to “plan” and have entered takeoff, waypoint, loiter_time,and return to launch. Now to figure out how to execute this mission. I will keep struggling.
Thanks, I will keep reading. My joystick seems to be detected at least.
I can list commands under thy plan option
'Now to get the plan executed.
Question about Mavlink now. I know that MP sends commands to the drone using a set of commands. I have read about this. Knowing this, it seems like I can make my own MP using these commands. How does the drone send its data back to the MP for display? HOw does the drone send back the roll, yaw, alt, and etc data to the MO for display??
However, Mission Planner is not a requisite for operation. GCS-less operation is actually quite common using an RC transmitter alone, or, less commonly, auto-arming on boot followed by full autonomy.
After saving the Mission go to the Actions tab on the Data Screen. Arm it, Switch to Auto Mode and with the Do Action Pull down select Mission Start. That’s it.
I few years ago I set up a LibrePilot Drone and merely controlled the drone using the joystick on the xmtr. I am trying to learn a lot more about drones now.
When I start MP, there is a screen that looks like a heads up display on an airplane. It shows bearing, altitude, and other data. I think during operation, this window is updated in real time with data from the drone via telemetry. Telemetry uses the Mavlink protocol I think. So what updates the “heads up” screen? The data must come from the drone via telemetry.
When using the SITL simulator, I would expect this window to be updated also.
When using telemetry, there is a serial link between drone and ground station. The drone must be able to send its statujs to the MP for display.
I agree it is not a useful effort to reinvent the wheel but a lot of detailed knowledge can be gained by trying. I am attempting to learn all I can about ArduPilot. As I read, I still have questions that arise. Also, it is hard to find exactly what I want in the documentation. For example, using the video game controller is in the documentation but I never would have found it if you had not given me the link. I hope I do not forget the link. Dave asked about my transmitter. I wonder if I could use the joystick on my transmitter with SITL if I connect the transmitter sim output to my computer. I tried this and it did not seem to be recognized, as yet.
Google “arducopter joystick” it’s the top of the list. This works to find most content in the Wiki’s. The search function in the Wiki itself is poor but this works great.
If you have one of those FS-i6’s that seem to be popular because they are dirt cheap I doubt it will have that functionality. There is a way you can use it but it takes another flight controller. The cheapest betaflight level board will work.
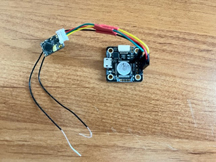
Here is my old simulator setup. Makes any RC system look like a game controller to Windows.