My suggestion is to ‘electronify’ the controls. 
I did some further thinking after my initial post, and decided to replace the controls with electronic controls (servos), after contemplating different options.
Since you need servos to electronically/remote control the mower, why not get rid of the mechanical controls altogether, and replace the latter with knobs of sort.
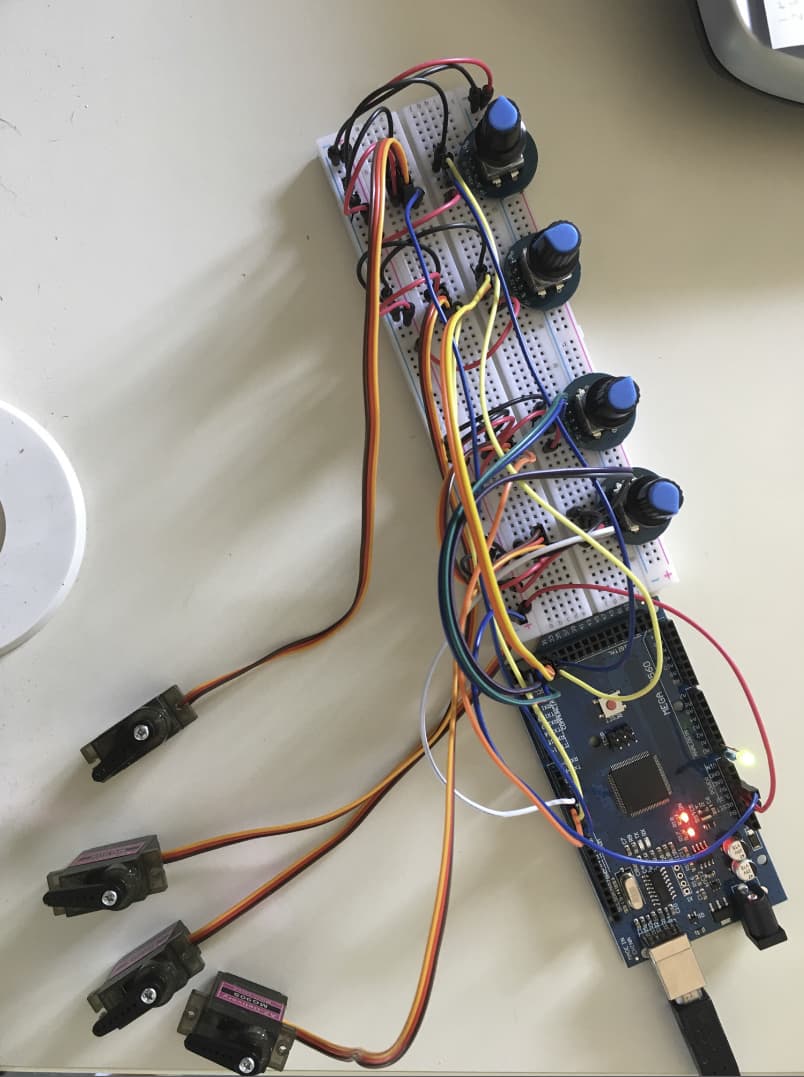
This is the prototype which will replace the mechanical controls:
The knobs are rotary encoders, left, right hydrostat, throttle and gas.
The controller is an Arduino Mega. It has enough inputs to cater for all security switches, etc.
The little servos are just proof-of-concept, and the outputs of the Mega will drive power electronics for the big servos. Only two big ones are needed for the hydrostats; accelerator can be a small one; and choke can be a small one.
This arrangement allowed for an auto-cold-start function based on engine temperature (sensor added). I also added a oil pressure sensor, and tank level sensor.
I retained the starter key; however, the throttle knob has an integrated push-button function which triggers the starter (either key or push button can be used).
This functions all by itself, and is totally separate from any automation.
However, input signals from the automation side can be read to signal to the servos what to do.
The safety switch functionality has been retained, but the logic is software, based on safety switch input (seat, control arm position, deck on|off)
The rotary encoders for the hydrostats will be replaced with magnetic angle sensors, with the magnets attached to the control arms.
A single switch will change the mover from auto to manual mode.
Instead of retaining another initial idea of adding a few relays into the wiring harness to switch from manual to auto, I also decided to remove the original wiring harness with a new one, which is much simpler, as it does not need to follow elaborate (yet genius) routing which are mainly representing safety circuitry.
Choosing this route allows for the mower to be reverted back to factory state in a matter of one hour.
Happy automating!