I desperatelly need help here…I had Pixhawk 2.4.8 based quadcopter and recently buy two more motors, esc’s, frame…and so on…to build hexacopter. Quad works fine, but when I upload new firmware from Mission planner (4.0.2) my drone won’t arm.
Everything else seems to be OK…I can connect Pixhawk to Mission planner…but it shows only 4 motors in Motor test. Not sure what to upload which can be useful to resolve my prob…
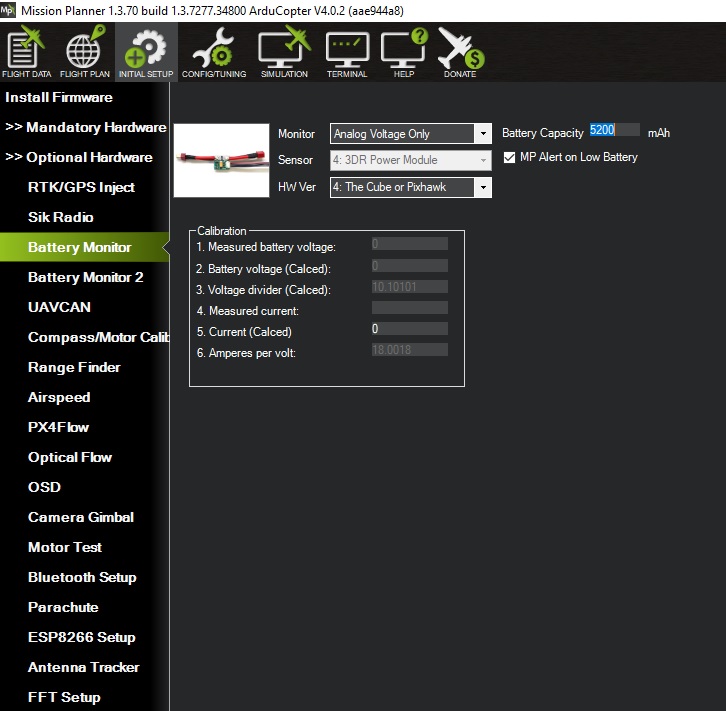
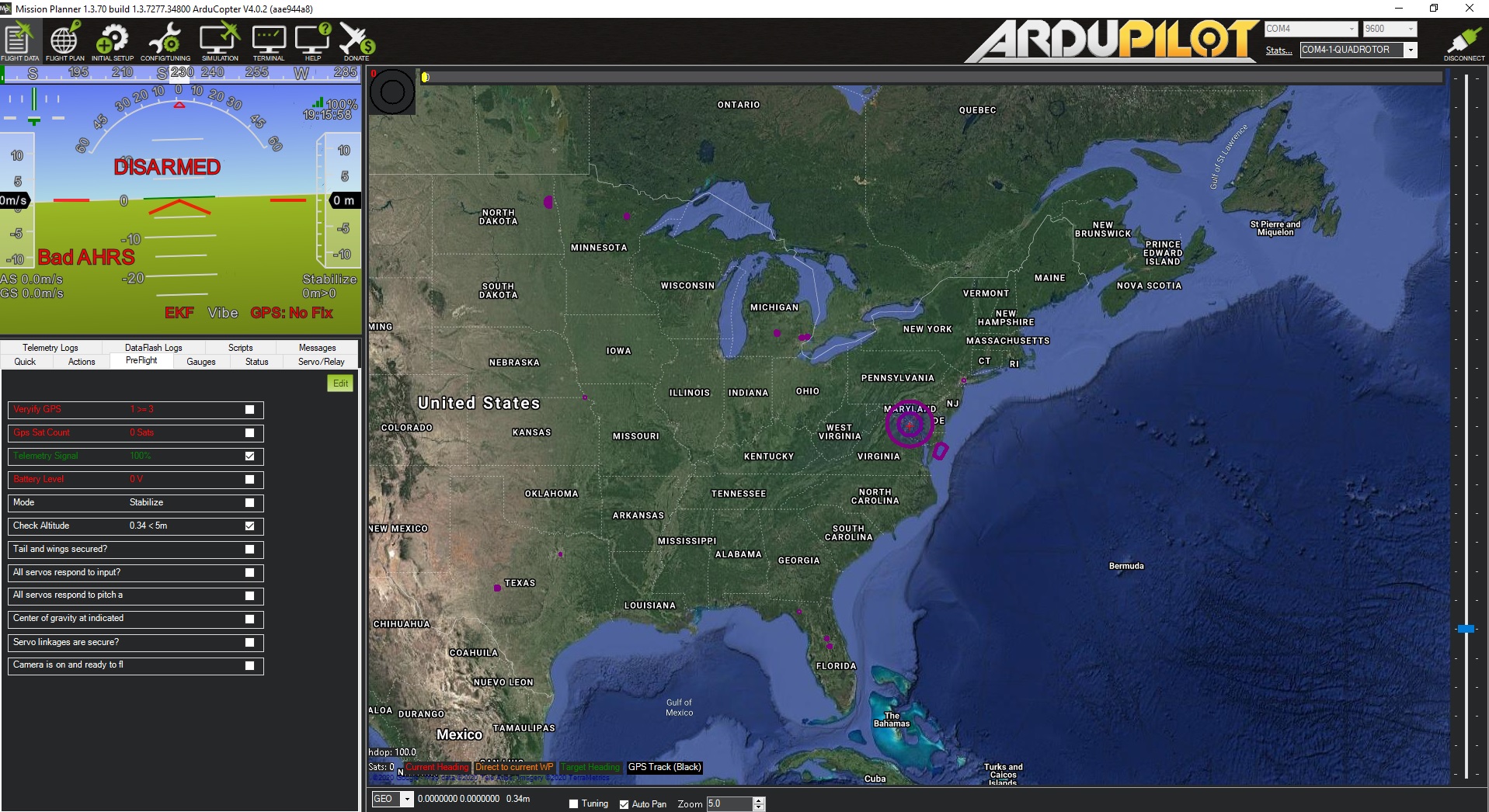
Yup…I’ve just gone through all Initial setup…everything seems to be set. What I’ve notice is that GPS doesn’t work and also Battery level shows 0 V…even I have plugin the battery…
Do you see 6 motors in the motor test tab? As for the battery level do you have the parameters set up in the battery monitor window? You’ll have to check to make sure the serial port you have the GPS plugged into is set up properly.
Your FRAME_CLASS parameter is set to 0 (undefined). Change it to 2 for Hexa and reboot the board. You have no motors assigned to outputs now (the SERVOx_FUNCTION parameters.
Oh you’re right I was looking at it upside down. At this point I’m not sure what to tell you. It looks like your settings are correct, and if it worked previously I don’t know why GPS would stop working.
I’m an idiot…what can I say…simply, it wasn’t able to get satelites in the room (even it was near to window). Previously, it just had satelites in his memory and it get them easily after restart…but now, after new firmware and my reset of pixhawk, it just erase his memory…
I just take it to the balcony and wait for couple of min…
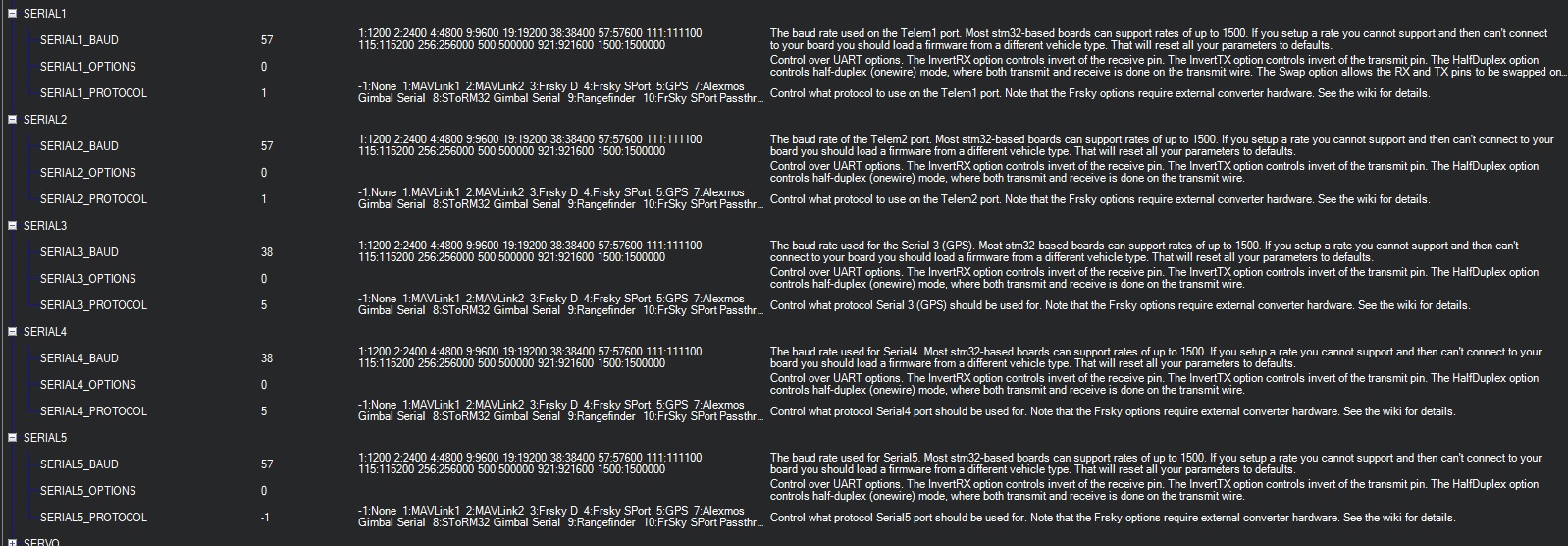
Serial 0 is USB (serial protocol 2 (MavLink 2), 115200 baud)
Serial 1 is Telem1 (serial protocol 1 (MavLink 1, 57600 baud)
Serial 2 is Telem2 (serial protocol 1 (MavLink 1, 57600 baud)
Serial 3 is GPS (serial protocol 5 (GPS), 38400 baud)
Serial 4/5 are “Open”.
I use Serial 1 for 915mHz telemetry and OSD.
I use Serial 2 for a STorM32 gimbal controller
I use Serial 3 for GPS.
I use Serial 4 for FrSky S.Port passthrough (OpenTX) (serial protocol 10, 57600 baud) for telemetry to my Taranis X9E.