I installed my new Holybro Pixhawk 6C Mini on my Holybro X500 frame using firmware 4.3.1 on Mission Planner. There was a pull-down menu specifically for this aircraft which uses 20A 4S BL-HELI_S ESCs. I set the quadcopter up per instructions, and it worked just fine. Recently I had the quad on the laptop, and Mission Planner said there was a new firmware 4.5.1 and asked me if I wanted to upgrade. I agreed and installed the new firmware. Now the pulldown menu for a Holybro Pixhawk 6C Mini on a Holybro X500 frame is gone, and I can’t get any response out of the motors. The aircraft will arm and there are no errors, but the motors will not spin up. The Servo page in Setup shows all motors stuck. I tried calibrating the motors, but that did nothing. I’m clueless. What’s going on?
Here is what you should do:
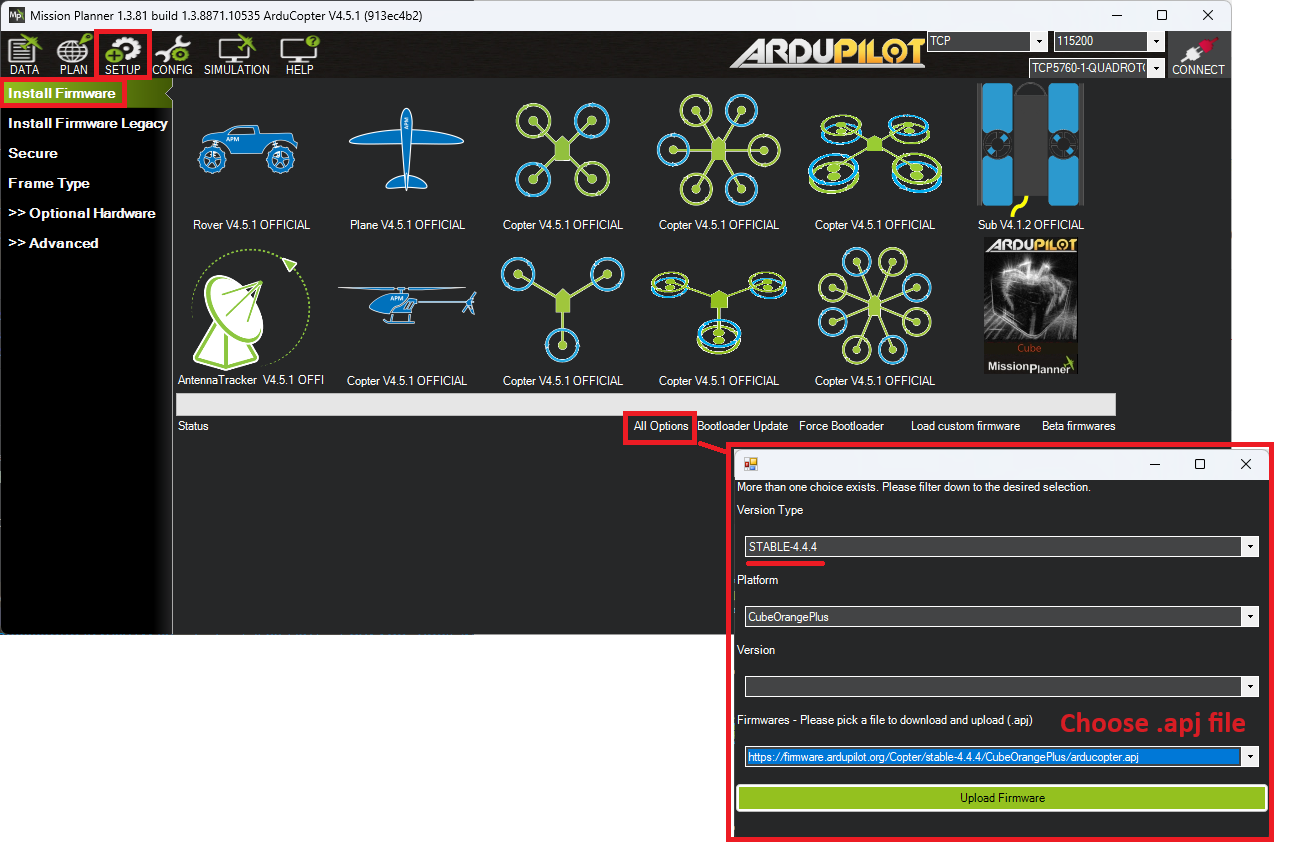
Flash the Bdshot version of firmware to the 6C.
Flash Bluejay firmware to the ESC’s
Configure for Bdshot
Hi @marlinlinger,
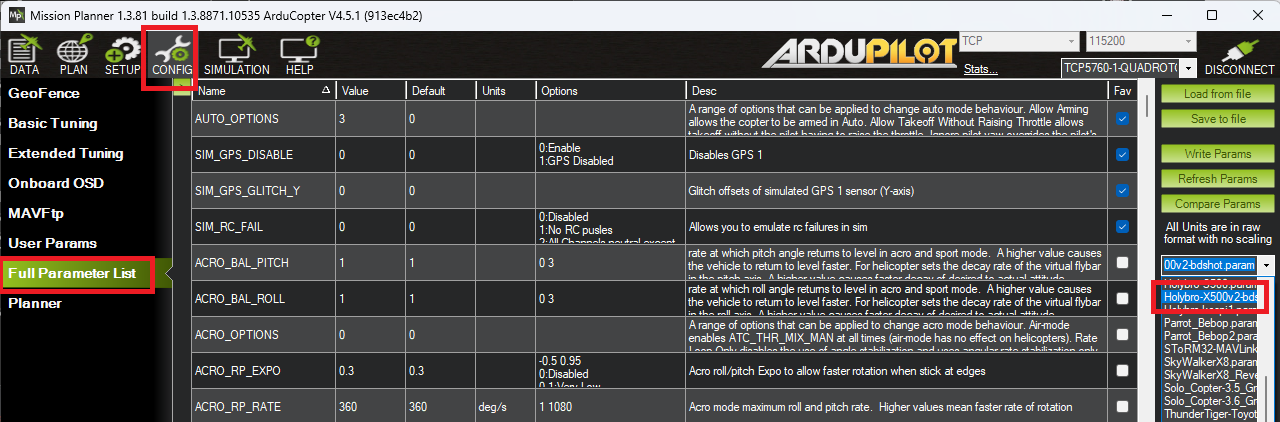
Re, “the pulldown menu for a Holybro Pixhawk 6C Mini on a Holybro X500 frame is gone” do you mean one of the parameter files that appears in the right drop-down on MP’s Full parameter list?
By the way, if you get blocked with a new release not working you can always go back to the older release. Mission Planner’s
We are quite careful with releases to ensure they are stable and we prioritise fixing bugs over enhancements but in case you need to backout to an older release, the option is there.
You know what would be nice? It would be nice if the Arducopter website had a page dedicated to Holybro frames and current Pixhawk setup. I suspect that most Pixhawk users start with Holybro equipment these days. The national student drone competitions almost all use them. That would be so much better than relying on forum websites and non-existent manufacturer and dealer support. It would hlep to bring the Pixhawk brand into the mainstream like DJI, rather than the piecemeal, backward, hobbiest system we have now. For what I’m paying for Pixhawk equipment, I shouldn’t have to go through forum bullshit like this. I should be able to wire up a Pixhawk quadcopter and have it in the air in ten minutes like a DJI. Somebody needs to take the helm and get this ship straight.
I have got a Holybro 500v2 with a Pixhawk 6c controller from Holybro for over 1 year. Everything was working fine until I upgraded the firmware to version 4.5.1: motors won’t spin. I downgraded to version 4.4.4 and everything works again. Has there been a major change in addressing the ESC,s?
Post your parameter file and the ESC’s you are using.
The esc’s are: Holybro X500 V2 BLHeli S 20A ESC
x500v2_210424.params.txt (30.1 KB)
Can you connect to the Flight Controller and Write the Parameter file from the Full Parameters List screen and post that? The format of the one you posted is a hassle to work with. Or better yet post a link to a .bin Flight Log of 4.5.1 after arming.
Thx for the assistance.
I am using QGroundControl (QGC) and the param file I have sent is the one obtained from QGC.
I uploaded a log file testing the quad to verify the motors (not spinning).
log_38_2024-4-27-15-31-30.bin (852.8 KB)
Do you have Bluejay firmware flashed to the ESC? (you should) If so set these:
BRD_IO_DSHOT,1
MOT_PWM_TYPE,5
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK,15
SERVO_DSHOT_ESC,2
Re-boot the board.
If not don’t set the BDMASK parameter.
And then re-configure the notch filter to use RPM.
Thx, it works! I used:
BRD_IO_DSHOT,1
SERVO_BLH_AUTO,1
SERVO_DSHOT_ESC,2
Hi. For the benefit of other Pixhawk users who are still in the SimonK Pixhawk 1 universe, would you please explain the 27-28 April conversation between Dave dkemxr and Andre Van Calster? What does all that mean and how do I accomplish all of that? I have the same issues. I do not have a degree in electrical engineering or computer science. I just want a Pixhawk quadcopter and flight controller direct from Holybro and running on Mission Planner to fly out of the box and with the minimum of technical jargon. How about some help?
Buy one of these ESC’s; BLHeli_32, BLHeli_S or AM32. Most of this dialog was fairly basic ESC configuration.
Nothing, nothing, will fly out of the box with Ardupilot.
https://ardupilot.org/copter/docs/common-autopilots.html
https://ardupilot.org/copter/docs/initial-setup.html
And most important:
What would be the simplest way to install a Holybro 6C Mini flight controller, which has FMU output ports, in a Holybro X500 quadcopter, which has FMU output ports? The X500 supposedly has RAPTOR BLS-Pro 4S 20 Amp ESCs which support BL-Heli-S and DSHot300. From what I gather here, I should connect the ESCs to the FMU ports. I saw on YouTube that these ESCs do not require calibration with DShot300; that’s as much as I know about them. Which Arducopter firmware version would work on this aircraft? I tried 4.5.x, and the motors would not spin, but then I had the ESCs connected to the I/O PWM OUT ports, not knowing any better. With version 4.3.1, the motors spin, but I do not know if that is the optimal configuration, and I do not know if the motors are calibrated. I am thinking of trying the FMU ports and 4.5.x, but I don’t know if it is worth it, as the quad is at least flying now. Your thoughts and suggestions are welcome.
It’s not complicated. Flash Blujay firmware to the ESC’s if they are BLHeli_S. Flash the Bdshot version of firmware to the Flight Controller. Connect them to the FMU outputs and configure for BDshot with Dshot600.
That’s it. If they don’t spin it’s not configured correctly.
I flashed BlueJay on my X500 - it worked fine
Hello Andre Van Calster, I’m a PhD student working on drone network security, and I’ve chosen the Holybro Kit for my drone testing. However, I’m facing the same problem you encountered. After changing the firmware version, my motors stopped spinning properly—only three motors are turning, and motor 1 isn’t responding.
I’ve tried several solutions found online, but unfortunately, nothing has worked so far. Since I need to fly my drone within a week, I would greatly appreciate any advice or suggestions you could offer to resolve this issue
Hi Salah, in my case the solution suggested by Dave solved my problem
Hello Andre, thanks for your response. I tried flashing my ESC with Bluejay, but it didn’t work—the program doesn’t detect my ESC. I even changed the cable, but it was the same result.
I’m currently using a 2000 mAh LiPo battery, but the documentation recommends a 5200 mAh one, so I’ve ordered a new battery and will see how it goes. To be honest, the configuration process isn’t very straightforward.