Is it ok to have motors slightly banked towards the inside (like dihedral on planes) to had a little stability or it is better to have all props on same plane?
I was wondering if having dihedral could in some way upset the controller.
Hi,
I cannot imagine that this would give you stability… It sounds a bit like the Pendulum rocket fallacy, that people apply to the centre of gravity of a multirotor.
But your question was if it would upset the flight controller, and I would suggest: No, not at all. Look at what we did, the flight controller handles this situation (which is by far worse than tilting motors inside) very well if tuned correctly. Btw, autotune couldn’t handle this.
The dihedral is not based on pendulum effect but by the fact that having it in case of a wind gust or an external perturbancy when the quad rotates the motor that goes up, because of the geometry, looses a bit of efficiency (thrust vector gets inlcined) and the motor that goes down increases efficiency (thrust vector gets more vertical) so the system is a bit more autostable than having props all on the same plane.
Since we use this on all our copters and we have virtually no vibrations on x and y and a bit more on z i was wondering if for any reason this could be what makes it happen.
I don’t know, maybe I don’t get your idea. I attached an (awful) drawing of how I see the forces, but maybe I don’t get your idea.
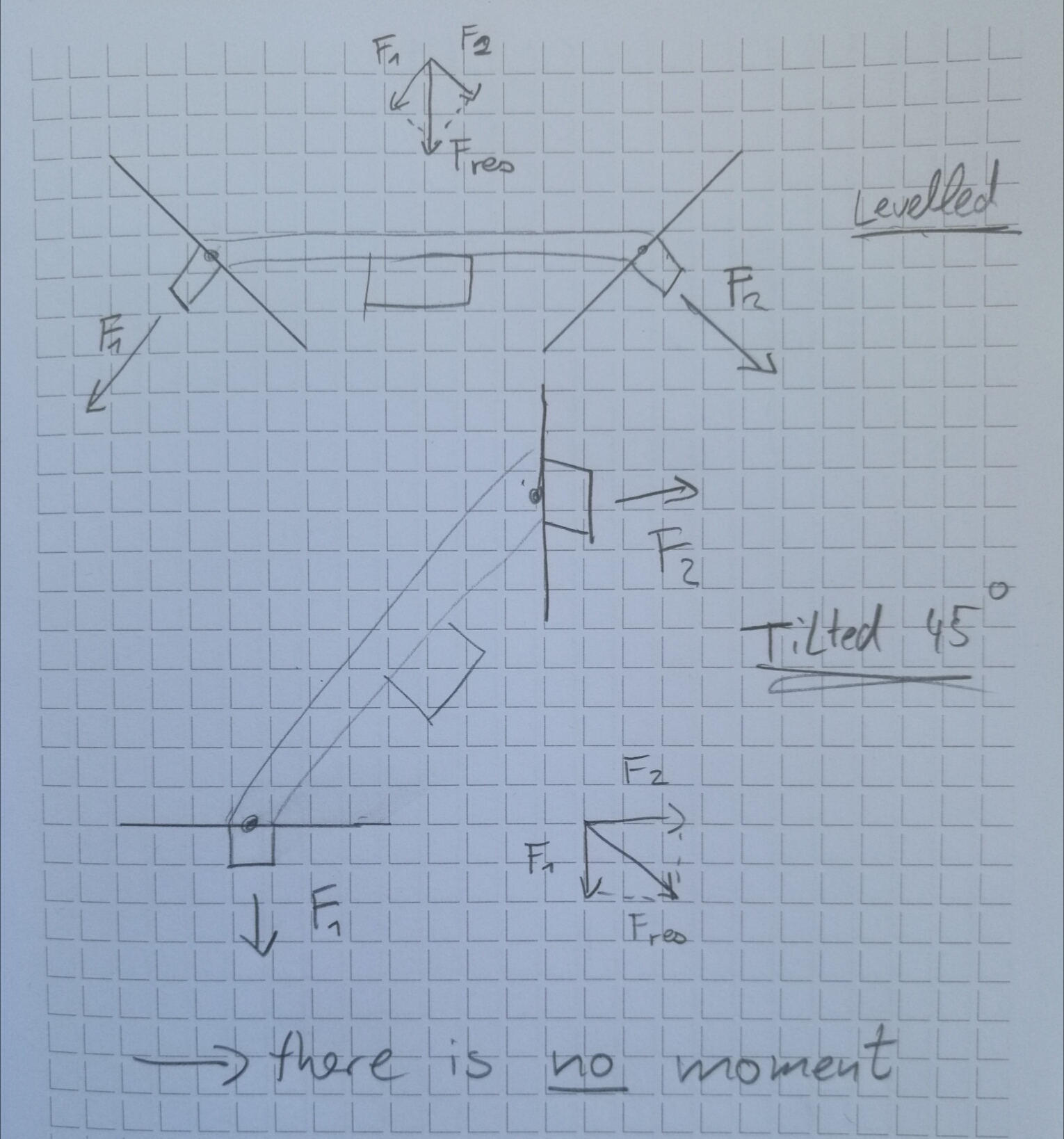
I think, if you add a gravity vector to your drawing, it should become clear. Gravity is pulling the copter down in its center of mass. In your drawing the middle between the two props. If the copter is leveled, both props work the same amount against gravity, but tilted like in your drawing, one motor adds nothing to lift the copter, while the force of the other motor is working 100% against gravity, resulting in a rotation to level the copter again.
Without advertising anything DJI S800 or Matrice have upward tilted arms, with slightly outward blowing props, while Yuneec copters have upward tilted arms but the motor mounts remove the tilt from the motors. So it is unclear if they do it for stability of flight or to keep the props out of the camera view.
I always tilted the props of my H-copters, so the thrust vectors would aid yaw control. Even a few degrees make a lot of difference in yaw response. This works for X-copters too, of course.
Typical multicopter design with dihedral angle is like ~5°. You would have to be flying with an attitude of 85° for the opposing motor to be contributing nothing to the whole lift. Your drawing makes it look like this scenario is easy to achieve. 45° as you have drawn is not out of the realm of possibility, but 85° is some extremely aggressive flying .
On racing drones high attitude angles might be a common occurrence. But Ive never seen a racing drone with dihedral frame. Big camera rigs with dihedral angles like DJI S900/S1000 will rarely if ever achieve 45° attitude.
I found a paper claiming this:
When linear motion V has a component in the horizontal plane XY , a torque will act on the hovercraft, rotating it in such a way that will cause it to accelerate in the opposite direction. This mechanism generates a negative feedback that dumps the quadrotor motion.
The self-leveling works through horizontal motion (just like dihedral on a plane). I guess you can picture it as higher motors are unloaded more from horizontal motion than the lower ones. I have no idea how much this is going to help on actual crafts though. I do see anecdotes about how adding dihedral improved stability, but I am skeptical if these are actually effects of added stability afforded by dihedral, or simply because changing craft geometry somehow helped mask a bad tune or remedy insufficient control authority about an axis.
This is pretty old, but I cannot leave this like it is now… What you say directly relates to the rocket pendulum fallacy I linked above. There is no levelling without moment. Period.
Tilted arms may have other benefits (maybe the downwash distribution changes, leading to less oscillation when descending straight down?).
The paper also mentions an interesting detail. Tilted propellers that experience a horizontal velocity component change thrust. A propeller that is tilted towards the horizontal displacement creates less thrust, the propeller tilted against the displacement creates more thrust. This would in theory help to level the copter. But in practice, our control loops are tuned properly, so that the flight controller will sucessfully work against any rotation, cancelling the positive effect. The only benefit might be additional position dampening (as mentioned in the paper), there is no additional levelling. This is also nicely demonstrated in the peer reviewed, published version of the paper linked above (find it via sci-hub). Here, the reviewers apparently forced the authors to point out advantages and disadvantages of the tilted rotor concept. It becomes pretty clear that the authors searched desperately for any situations where tilted propellers may have an advantage.