Hello,
I got always the same problem with my 800 frame on many versions of arducopter (3.5.x, 3.6.X), now the same with 3.6.9.
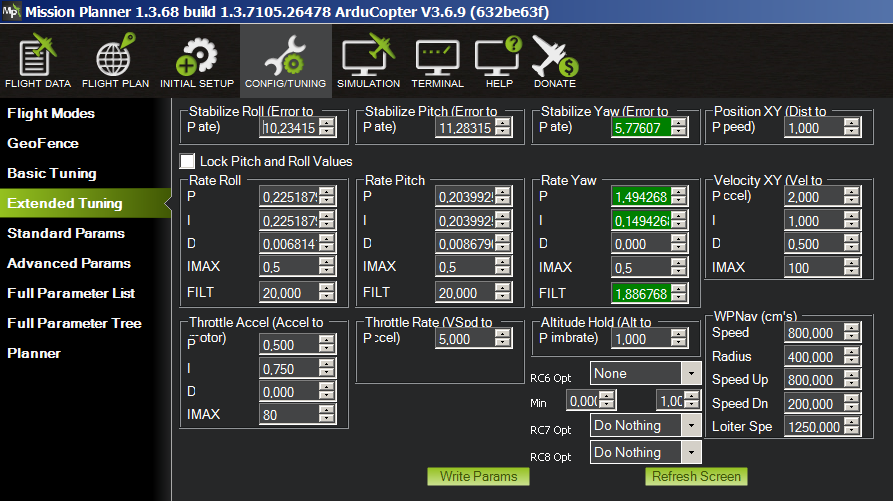
When loaded copter with default PIDs it flies sluggish but mottors runs smooth. After autotune I got these PIDs:
And with these PIDs maneuvers are cool but mottors wobbles a lot. I guess some param is overshoot but don’t know which one.
Would somebody advice me please, which parameter should I lower?
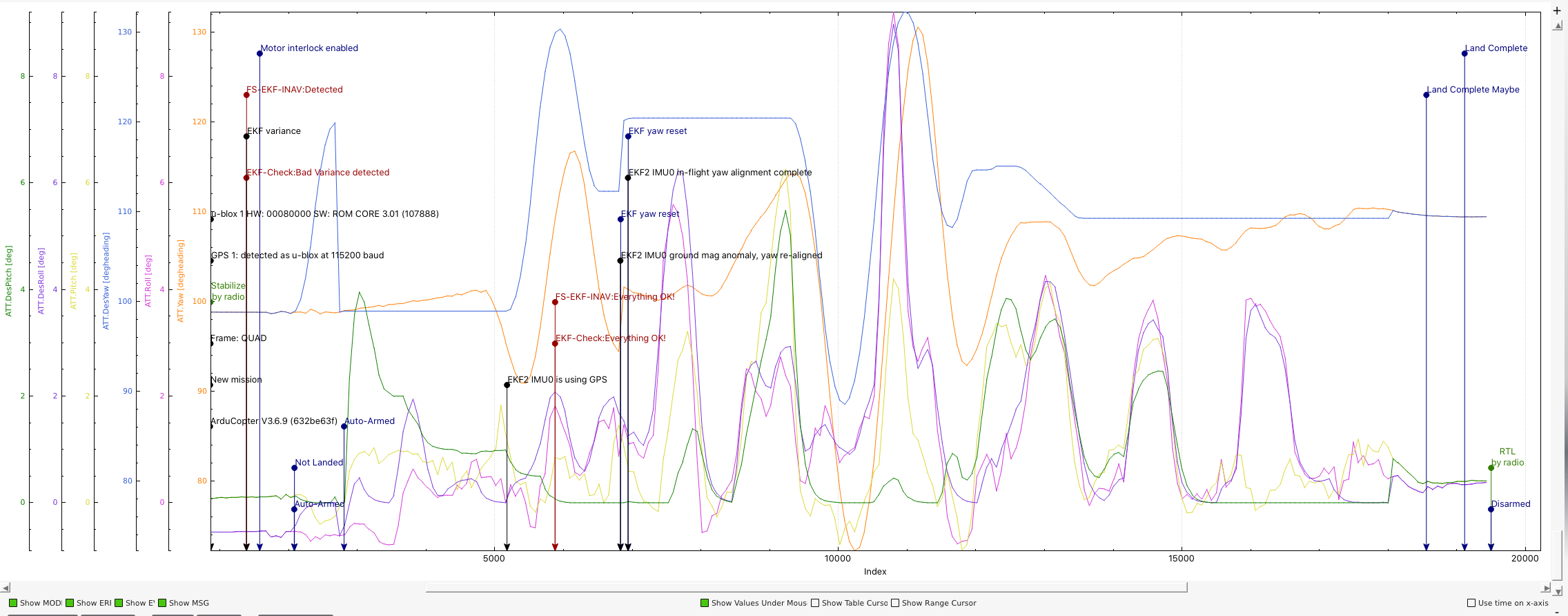
Here is log file from short flying: 2019-08-12 10-39-04.zip (476.5 KB)
2: Assuming you are using props > 13" for an 800 size, set your ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT to 10 as detailed in the tuning Wiki here and here.
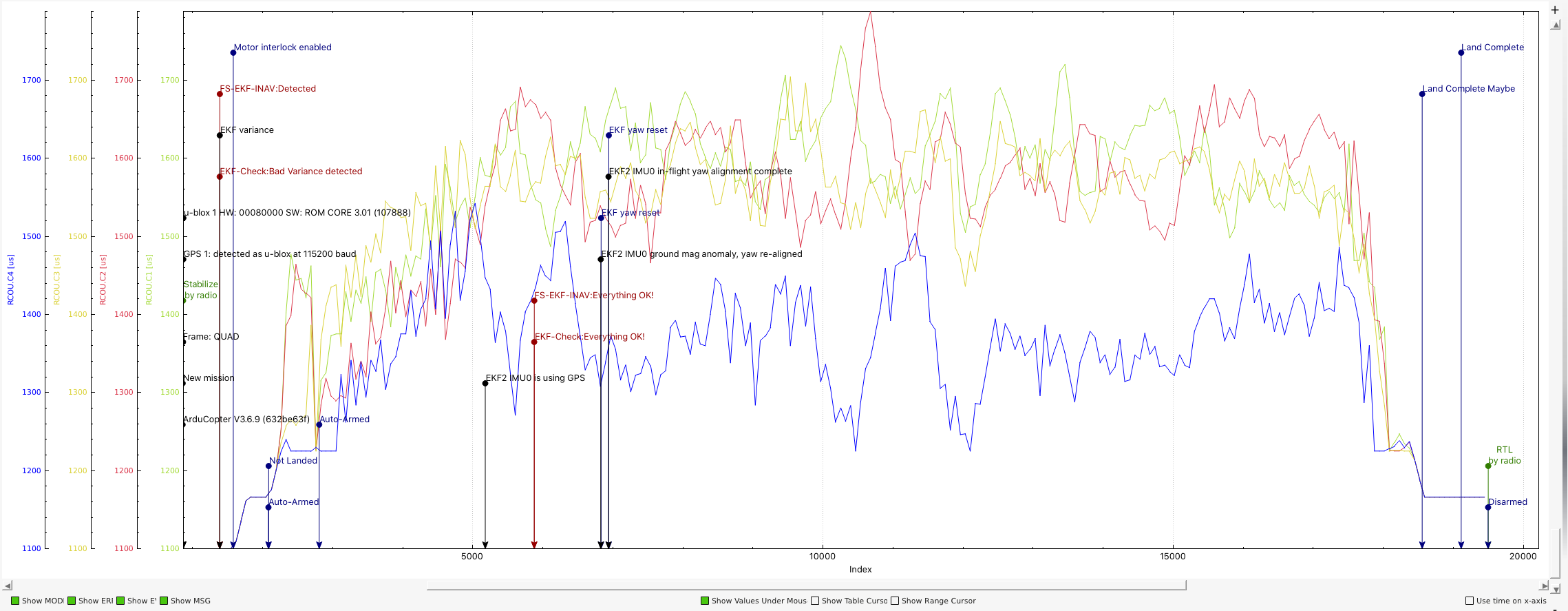
3: fix the motor imbalance, M4 is having to work a lot less than the other 3.
Yep, thanks for pointing me. With motor imbalance I’m reconciled for a long time since I don’t know where it comes from - identical motors, identical ESPs and propellers, all from the same batch. And one motor is still lazy. I did ESC calib many times, didn’t help.
Today I flu with lovered PIDs (around 1/4 lower than was after auto tune) and it helped somehow, but still can’t get rid of wobbling absolutely.
Just one off topic question - what log analyzer is this
? It doesn’t seem to be the one from MP, is it?