Appealing to anyone that knows anything or everything, all help massively appreciated!
I have gone through the setup process many times and the best I have is 2 servos working but not the motor.
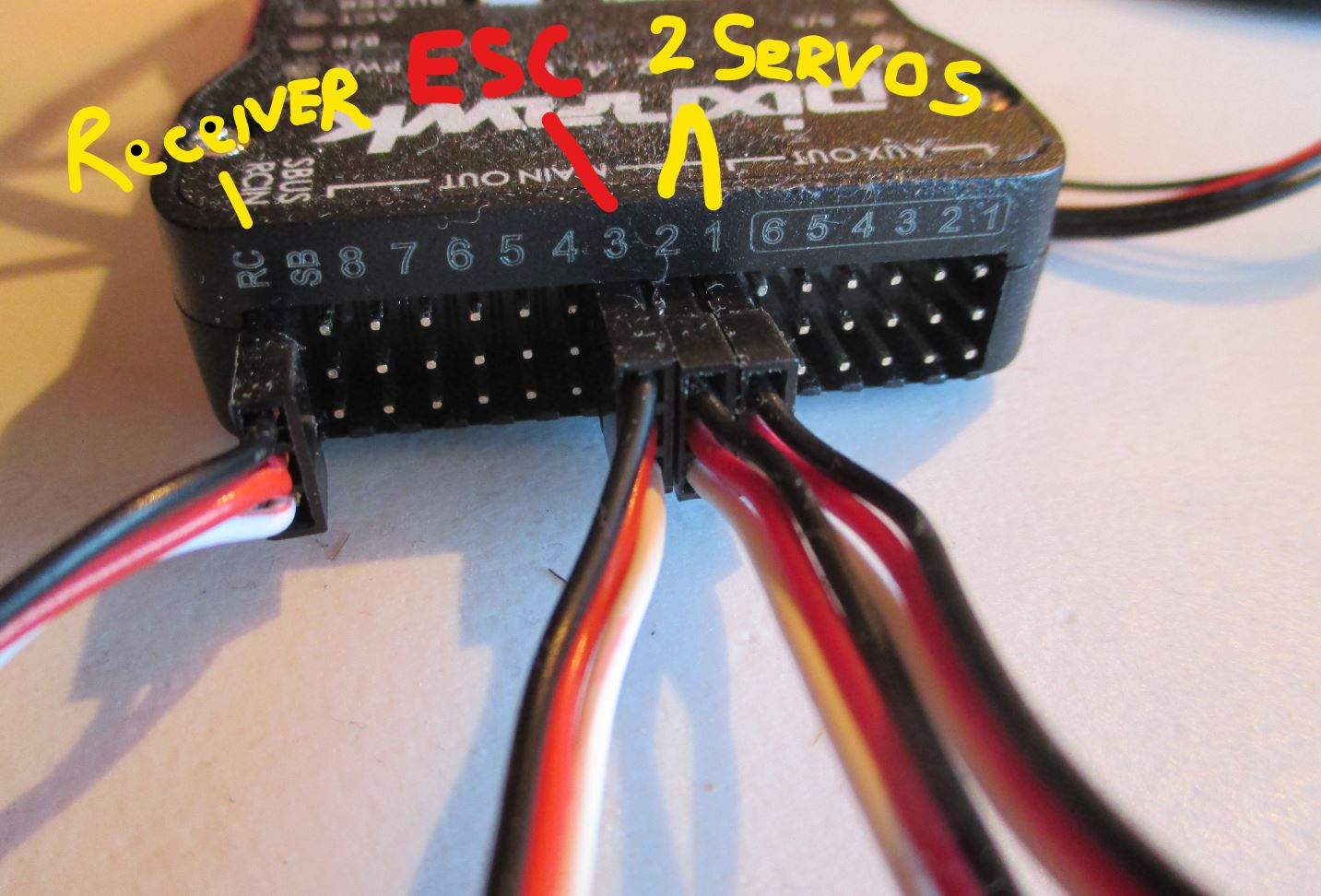
MAIN OUT slot 1 and 2 work perfectly (with servos) and even when I have the ESC in either 1 or 2 I can control the motor with roll or pitch input on the transmitter…which makes sense.
However, when i put the ESC wire into MAIN OUT 3 (the throttle port) nothing ever happens even after holding arming button and arming with the RC sticks.
I have calibrated the ESC a few times outside of the Pixhawk but have not been able to calibrate it while all wired into the Pixhawk.
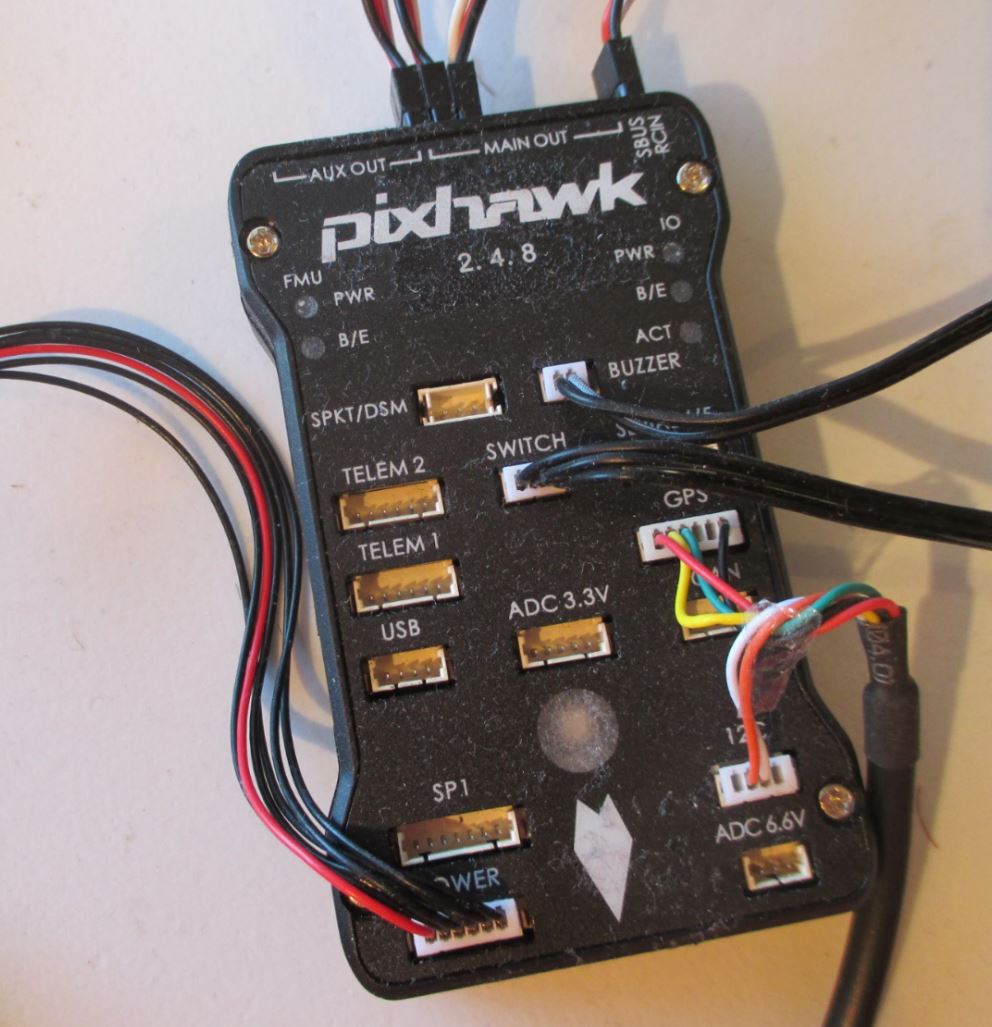
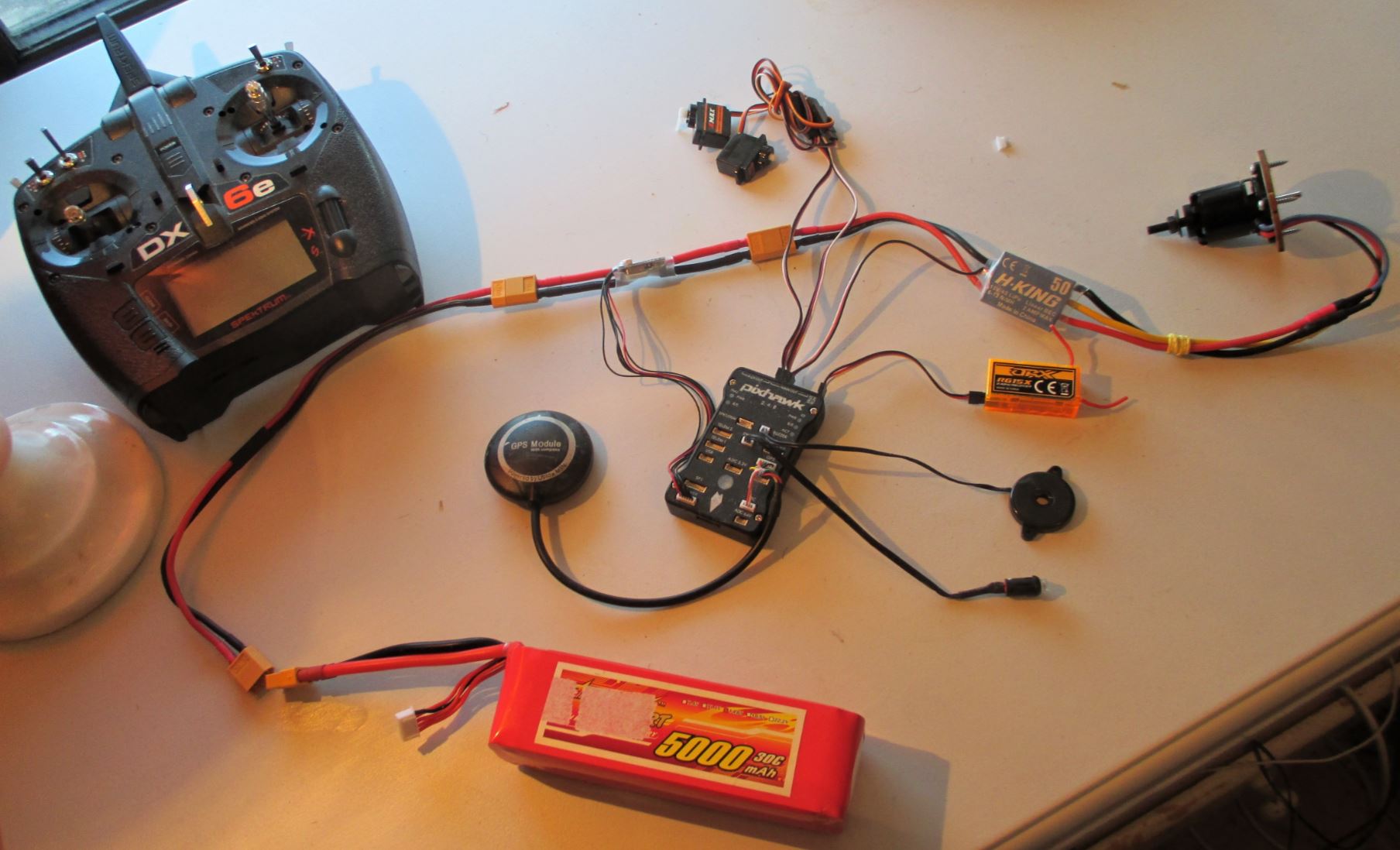
Hope the photos cover all the necessary items.
i think the issue may be the fact that Roll and pitch input are connected, i am trying to separate them on my transmitter but having difficulty
RC = Spektrum DX6e
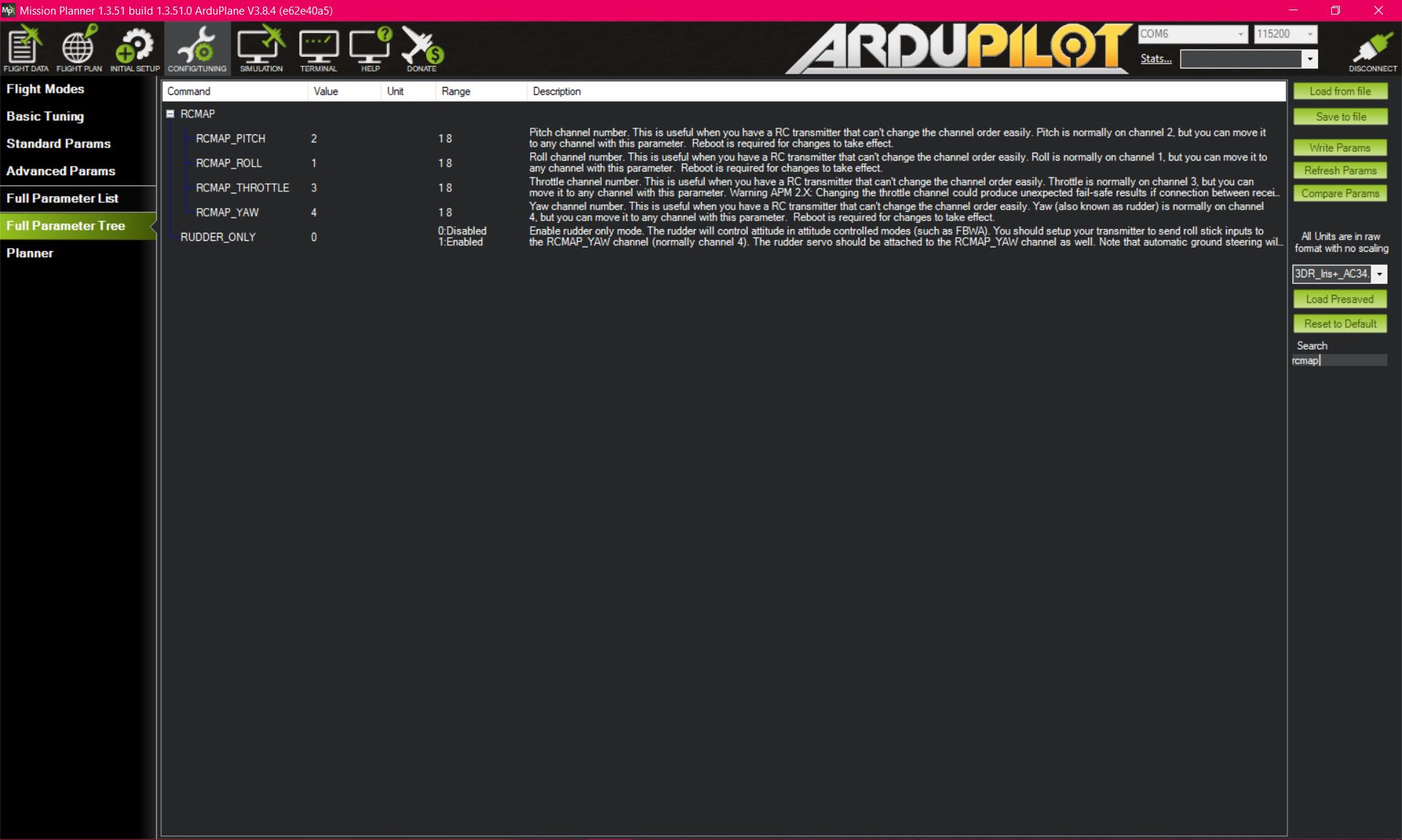
RCMAP_PITCH = 2
RCMAP_ROLL = 1
RCMAP_THROTTLE = 3
RCMAP_YAW = 4
RUDDER_ONLY = 0 (Disabled)
Messages after trying to arm:
u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
GPS 1: detected as u-blox at 115200 baud
PX4v3 0041003D 3436510C 32393637
PX4: f84ee497 NuttX: 2f230473
ArduPlane V3.8.4 (e62e40a5)
Log 1 of 2. … cant seem to upload the larger file due to it size but its only 2,000kb when the limit says 4,500kb.
I had the parameters set to log while disarmed.
2 01-01-2000 00-03-02.bin (992 KB)
Google Drive link for all the logs (Not sure if it will work)
https://drive.google.com/drive/folders/15tsXneN0oErY5To62LaKLrNB2u6kFyKx?usp=sharing
Thanks for all replies!
Exact Pixhawk > https://www.banggood.com/Pixhawk-PX4-2_4_8-Flight-Controller-NEO-M8N-GPS-Radio-Telemetry-PPM-OSD-3DR-p-977597.html?rmmds=search&cur_warehouse=CN
Images: