Hi, when running motor test on mission planner, the system says that it initialized the motor test and then successfully completed the motor test. However, the motors don’t spin (I’ve tried all options; testing motors a through d as well as test all motors). I believe that calibration of all mandatory (e.g. accel, compass, rc, etc) and some optional were all completed successfully. Currently using a pixhawk 6c mini as well as hobbywing 65a 4 in 1 brushless electronic speed controller, with a singular f2203.5 motor from t-motor hobby that is soldered onto the esc. esc is connected to pixhawk as well via ground, and + wire as well as wires 1, 2, 3, and 4. can provide more details as necessary.
How did you have the motors powered? Is it the correct battery?
Did you try to increase the MOT_SPIN_MIN value? It starts at 5% on the test page, but often you need to increase that.
Motors are connected to the esc which is connected to a battery. I’m pretty sure on the motor test page I increased the spin value to 15% and increased the duration as well but still don’t get the motor to spin. I can get back with more specifics sometime early in the week once I get back to my drone
Did you hear tones or anything when you plugged in the battery?
And you might need to go above 15. Shouldn’t be much more than that though.
Yeah I do, there are tones I think coming from the esc when connected to battery
Are you using Dshot?
The 6cMini has main and aux outputs. What pins did you connect to?
when you say dshot do you mean the mot_pwm_type param? yeah I have that at dshot600. for the pins, I connected four wires (s1 through s4) to the fmu pwm out 1 through 4 and then connected ground and plus to respective + and - pins at the far left. I also tried connected to 1 through 4 of i/o and didn’t have success. there are 4 other wires on the esc that are not connected to pins on the pixhawk but that’s because there is only one motor soldered onto the esc right now.
In the settings for the motor output the FMU outputs are actually servo outputs 9+, and the I/O PWM Out are servo outputs 1-8. So if you’re on the FMU side then you need to have motor one identified as servo 9.
how would I know how the motor is identified as? sorry I’m completely new to drones, and thank you for your help so far!!
https://ardupilot.org/copter/docs/connect-escs-and-motors.html
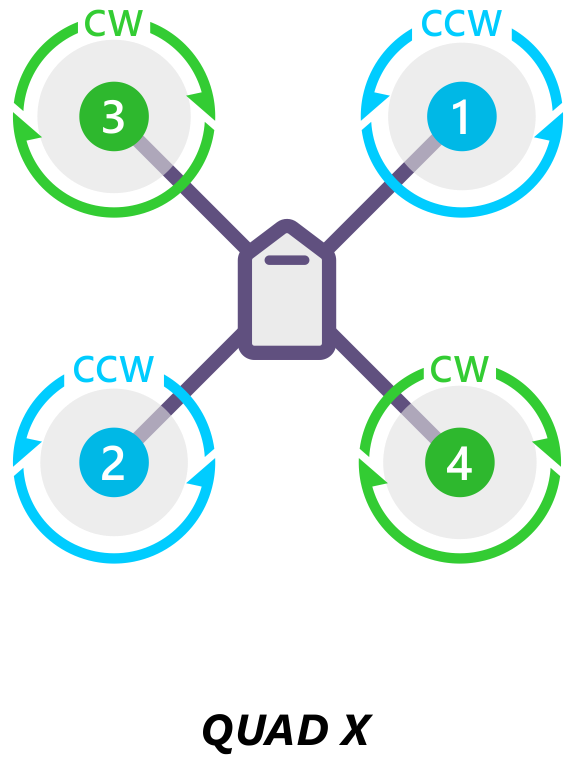
In the test motor 1 is A
Motor 4 is B
Motor 2 is C
Motor 3 is D
Post the parameter file.
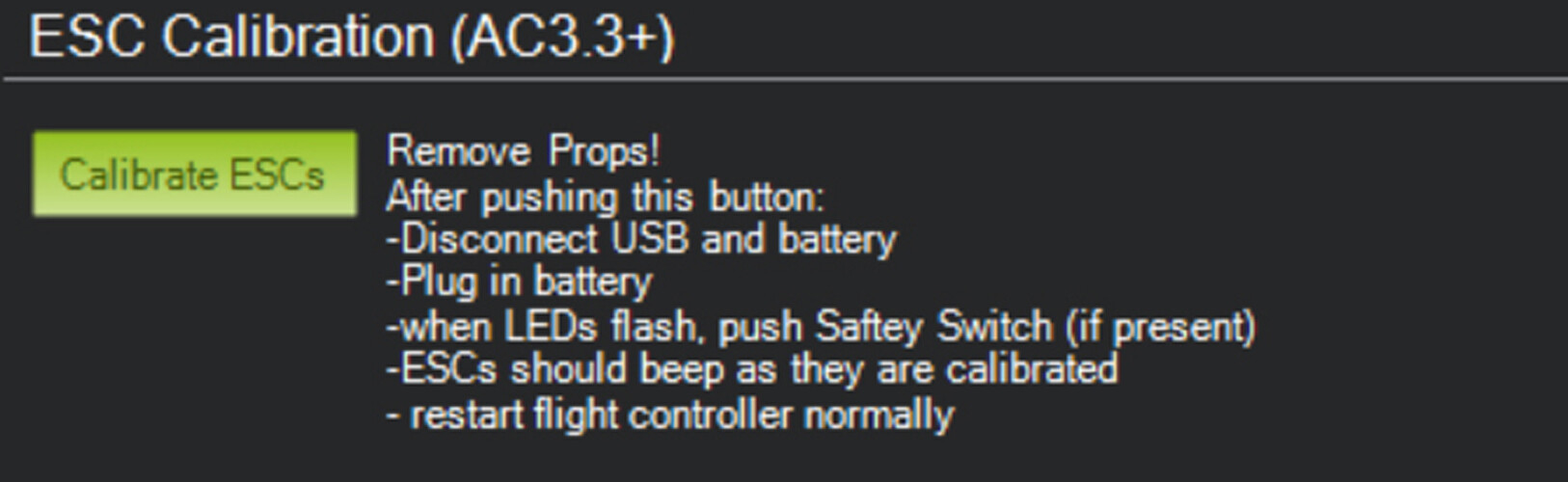
15% is kinda high. A good calibration will work in the default value. Can you reflash the firmware as a friend of mine said the Fram was not flashing correctly. His issue was with motor 3. If you do not have Dshot esc’s I recommend as does Randy to do a all in one esc calibration.
yeah so on my esc the motor is soldered to m1 and and the s1 wire is plugged into i/o pwm out 1. i’ve also tried fmu output 1 as well and haven’t had any luck with motors spinning either
i’ve tried this before and i’m not entirely sure if the calibration was successful, should i get a message saying that it is? the only thing is since you have to disconnect the autopilot it technically just reboots so i’m not even sure if it has calibrated
also wanted to add that i actually have a quad + frame as this is what the autopilot is flashed with
You have Dshot600 configured and have the Motors assigned on the main outputs. They need to be on the Aux outputs and assigned a such unless you know what Dshot on IOMCU means. I assume you don’t. Just switch the motors to the AUX outputs and assign them.
You don’t have several other parameters set to use Dshot either.
Go back to the Arducopter Wiki and do some reading.
1 Like
“Do some reading” ![]() … any new person who reads the docs gets lost quickly. Its not because of the fault of the reader. If you want new blood into the sport, you need to have better docs. Why can a reference implementation be explained, with every setting step by step (numbered) clearly defined. Just one reference implementation?
… any new person who reads the docs gets lost quickly. Its not because of the fault of the reader. If you want new blood into the sport, you need to have better docs. Why can a reference implementation be explained, with every setting step by step (numbered) clearly defined. Just one reference implementation?
I have been looking at this doc page for info about safety switch… the mission planner version 1.3.48.3 shown i found in a forum discussion from 2017… its at least 7 years old. This is in general an issue with Ardupilot documentation… where is the last edit date of pages? So that I could at least had a remote idea of the last edit date?
https://ardupilot.org/copter/docs/common-safety-switch-pixhawk.html#configuring-the-safety-switch
I know I can’t speak for everyone, but when I was new to drones I couldn’t wait to learn more and to find connections between features and how everything works together… And I regret to inform you the easiest way of doing so is to read documentation. ![]()
If you want a step-by-step guide with an example implementation that is also clearly explained, I recommend to read the How to methodically tune (almost) any multicopter guide. Of course it doesn’t have information about all the possible systems, but it’s quite comprehensive regarding tuning.