My rover is not moving forward-backward direction but it moves in left-right direction. I have changed a different motor controller and different transmitter-receiver but the problem is not solved yet. I am using Pixhawk 2.4 model. How to solve it?
This is not a transmitter receiver issue.
This is a wiring and/or firmware configuration issue.
Get the latest stable ArduRover firmware and follow the wiring and configuration documentation. After that post any questions here.
Hi, Thank you for your response. I think, my wiring with the motor controller and pixhawk is okay. Maybe, firmware issue it is. But I can run all the motors in mission planner in “motor test” page.
It is not a firmware issue.
It is a firmware configuration issue.
You need to correctly configure the firmware parameters for your use case.
Hello,
I have reupdated the firmware and calibrated the pixhawk but the problem still remains. What else should I do now?
Post exact photos of your vehicle. Explain it all to me like I`m a 5 year old. And will fix the parameters.
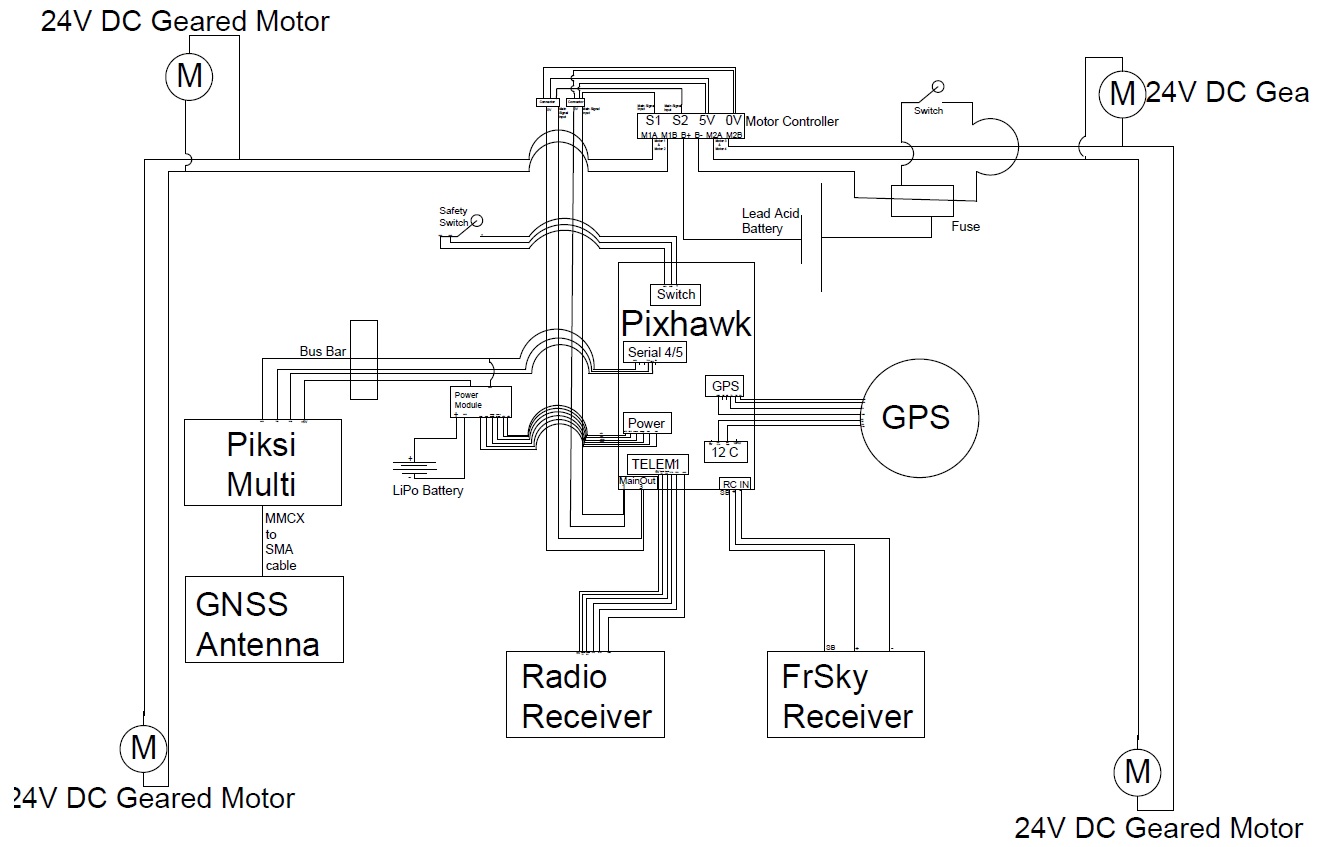
I have attached the wiring diagram of my AGV. Here, I have attached two 12V lead acid batteries. I have used FrSky X4R receiver, taranis X7 transmitter, Pixhawk 2.4, Sabertooth 2x12 Motor controller, Piksi multi and survey grade GNSS antenna, radio controller and radio receiver. At first it was working. Later I updated the mission planner, uploaded firmware, calibrated it and may be the problem was arrived after that. I can see in mission planner calibration page that the transmitter sends signal to the receiver when throttle is in high mode but motors are not rotating. For left-right direction, two motors rorates in one direction and two other motors rotates in another direction which is accurate. But for forward direction four motors roate in one direction but it takes a lot of time to go into full speed. Backward direction four motors should rotate in backward direction which is not happening. I have calibrated the pixhawk in mission planner. I can test motors in mission planner but via transmitter, four motors is not moving instantly and not moving in backward direction.