looking at your pic it seems there is no enough voltage for power the escs. Just check the correct voltage before use an external bec on the power rail… don’t exceed the maximum voltage.
Did you connect x8r on sbus?
yes I use the X8R…
I checked voltage and put on a 5V-3A BEC.
More things I changed:
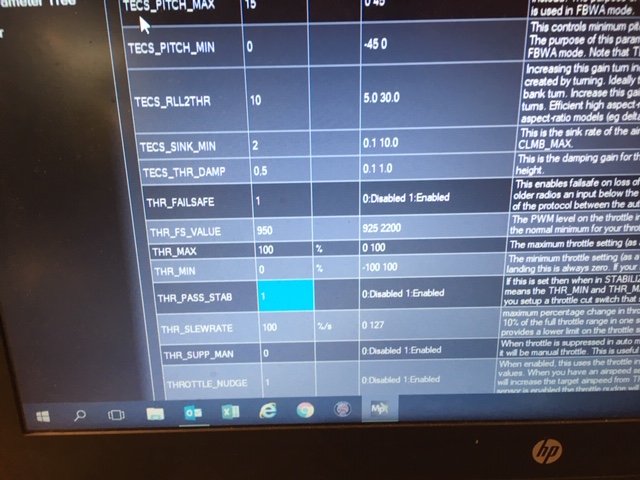
-enabled Throttle Passthrough in MP (THR_PASS_STAB)
-enabled flaps in servo menu (servo5)
-then I lowered the lower throttle limit from 1100 to 1033! and then the ESC came a live!
Now throttle is working in Manual and FBWA mode and I can safely arm/disarm it with throttle stick or MP.