I have a hexarotor that has been running fairly well for about a year. However, during a recent test, there was failure in one of the motors during an Auto mission. We did a couple of hover tests in Position Hold which went fine, but the minute I switched into Auto there was failure in one of the motors. Here are the drone’s specs:
Frame: Tarot T960
ESCs: Hobbywing X-Rotor ESC - 40amp (OPTO)
Props: 18 inch
Battery: Turnigy Graphene 6S 12000 mAh
FC: Pixhawk 2.4.8
Firmware: Ardupilot 4.0.5
Max all up weight: 12 kgs
Current weight: ~7.5 kgs
I’ve had several successful flights in the past without issue so I am not sure what happened here. Tried powering it back on after it crash landed and all motors were spinning up fine in throttle tests so it seems unlikely there was a loose connection somewhere. Anyway, here’s a plot of the RCOUT vs battery:
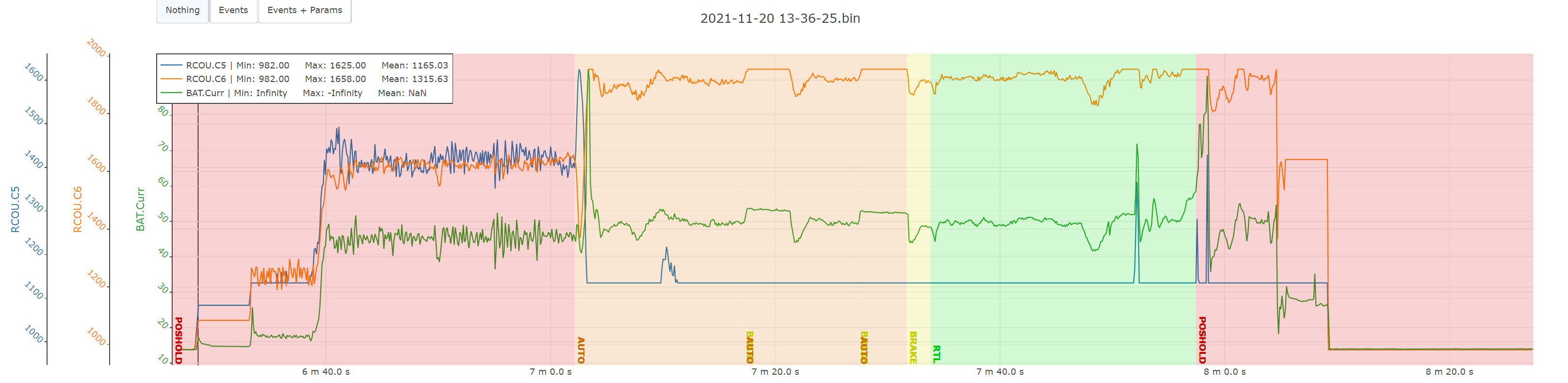
Some additional notes:
- During the malfunction, GCS showed:
Potential thrust loss (6)
even though RCOUT.C5 seems to bottom out in the graph.
2. In addition, GCS also showed:
Prearm Board 4.1V out of range 4.3-5.8V
This might be because I am using a Drotek 200A power module in lieu of a 3DR 90A power module. Again, this error has shown in the past but I’ve had several successful flights anyway. Both the .bin and .tlog files are attached below: