Hello,
I have a Pixhawk (don’t know if it is 2.4.8 or anything else) It’s a clone one.
Everything was ready for testing, but due to some reason, I was not able to test the drone for the last couple of months.
Today, I resumed working on it. And thought to upgrade the firmware. I did the same. And then I was facing a Throttle Failsafe issue. Which I think, I have resolved. However, along with the throttle issue, another issue I kept on facing is, beeping of ESC/Motor continuously.
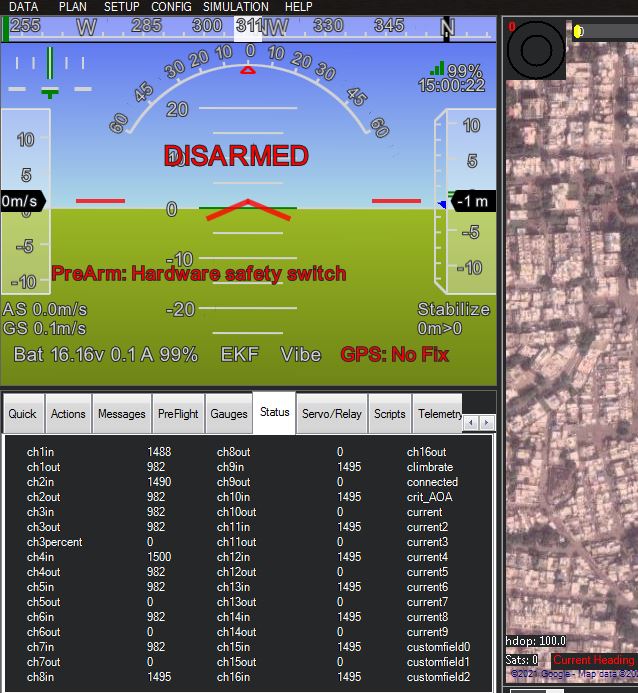
The error on the mission planner/QGC is “Prearm: Hardware Safety Switch” with Yellow flashing on Pixhawk.
The moment I armed it, it started beeping faster.
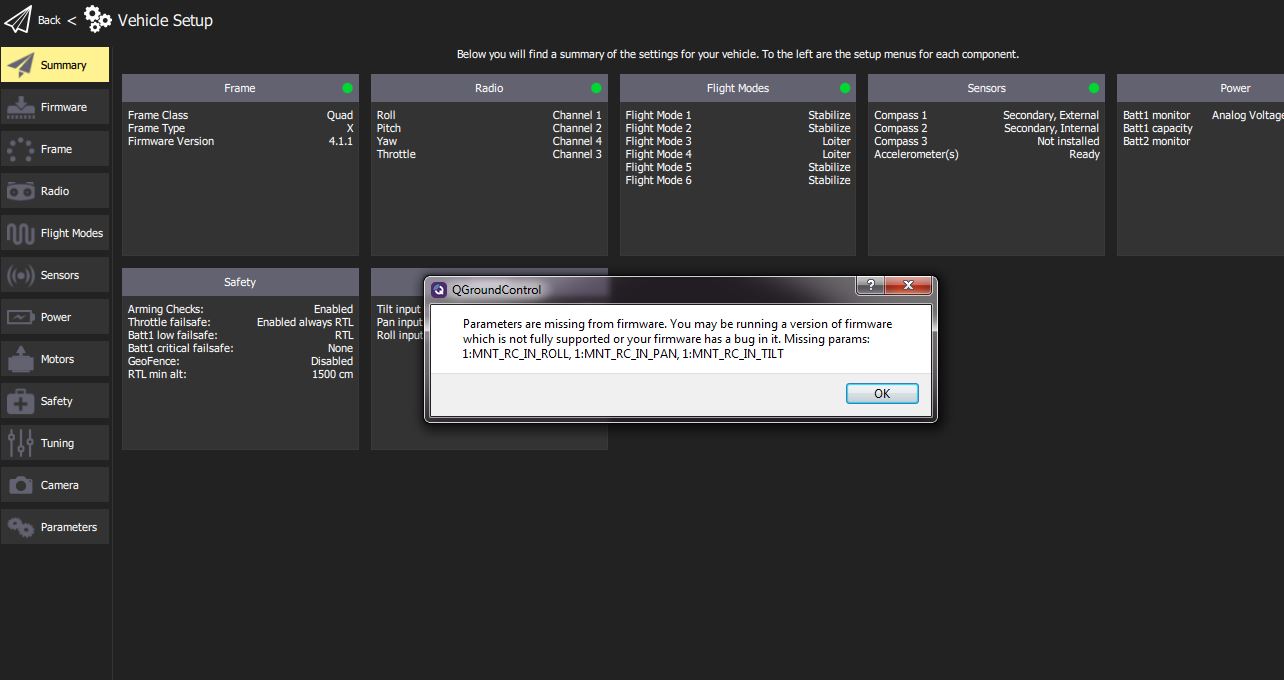
For details on Firmware and one more error, check image.
Can anyone please help me with the issue resolution?
Additionally, just curious to know a couple of things
a. Is MANUAL Flight Mode removed from the list? (My Flight Mode list is not showing that)
b. I want to BYPASS the SAFETY SWITCH and assign a Channel 5 for ARM/DISARM. How to do that? (I have done it in the past, however, now I am not able to do that)
There is no Flight Mode called “Manual”. Stabilize is likely what you are referring to or possibly Acro. Flight Modes
BRD_SAFETYENABLE set to 0 disables the switch. You can assign any channel for switch arming/disarming with an RCx_OPTION set to 41. This can be risky if you inadvertently hit the switch while flying.
Thanks, David for your input. But nothing resolved that.
Motor Safe Disarm was 0, initially.
I changed it to 1.
Issue not resolved
Changed it back to 0.
Another issue I faced today was when I turned the craft ON.
The safety switch armed automatically. The flashing red light turned solid after a minute of power ON.
The switch on the remote control side was already disarmed. No one touched the hardware safety switch to arm it.
Sorry, I have no more ideas. If you have BRD_SAFETYENABLE set to 0 and everything else default, the pixhawk should output MOT_PWM_MIN to the ESCs. If you connect the UAV to your PC you can check what PWM value is output to the ESCs in MissionPlanner under the Status tab. Search for ch1out, ch2out, etc.
Also, find the error sound here in the attachment.
The attachment is in PPT format. Just click on the speaker in the slideshow. I had no choice other than this, as this forum does not allow us to send any sound format.
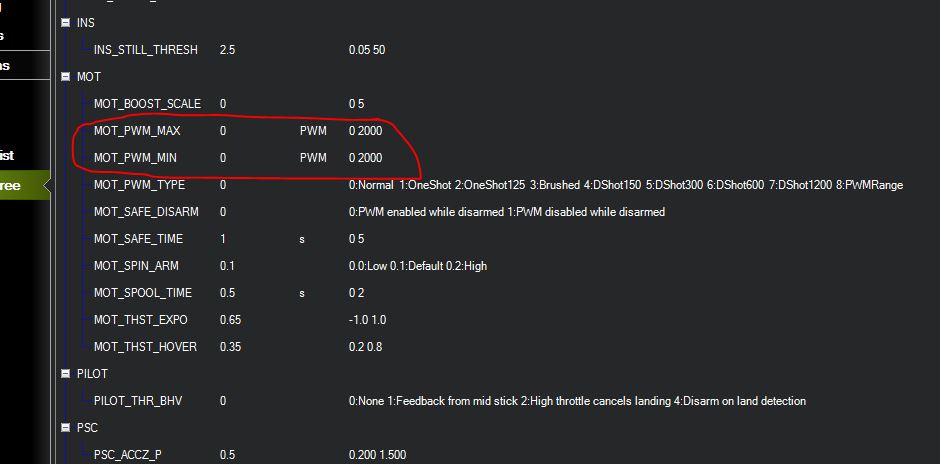
I suspect, that 982 might be too low for the ESCs to initialize and thats why they are beeping continously. Try to set MOT_PWM_MAX to 2000 and MOT_PWM_MIN to 1000 and do an ESC calibration.
The PPT did not work. The picture only links to a file Pixhawk error.m4a on your computer in the downloads folder. You can send a .zip file
Yes. I have followed and done all the Mandatory flight settings before going to the field.
Basically, I tried to fly it in stabilize mode and in planes, it keeps the craft stable, so thought that would be the same here too. Also, I wasn’t able to take off in Loiter mode.
Also, refer to the image attached to this thread post. It is of QGC screen which describes that it has some missing parameters.
Thanks for sharing the flight mode link. That was useful.