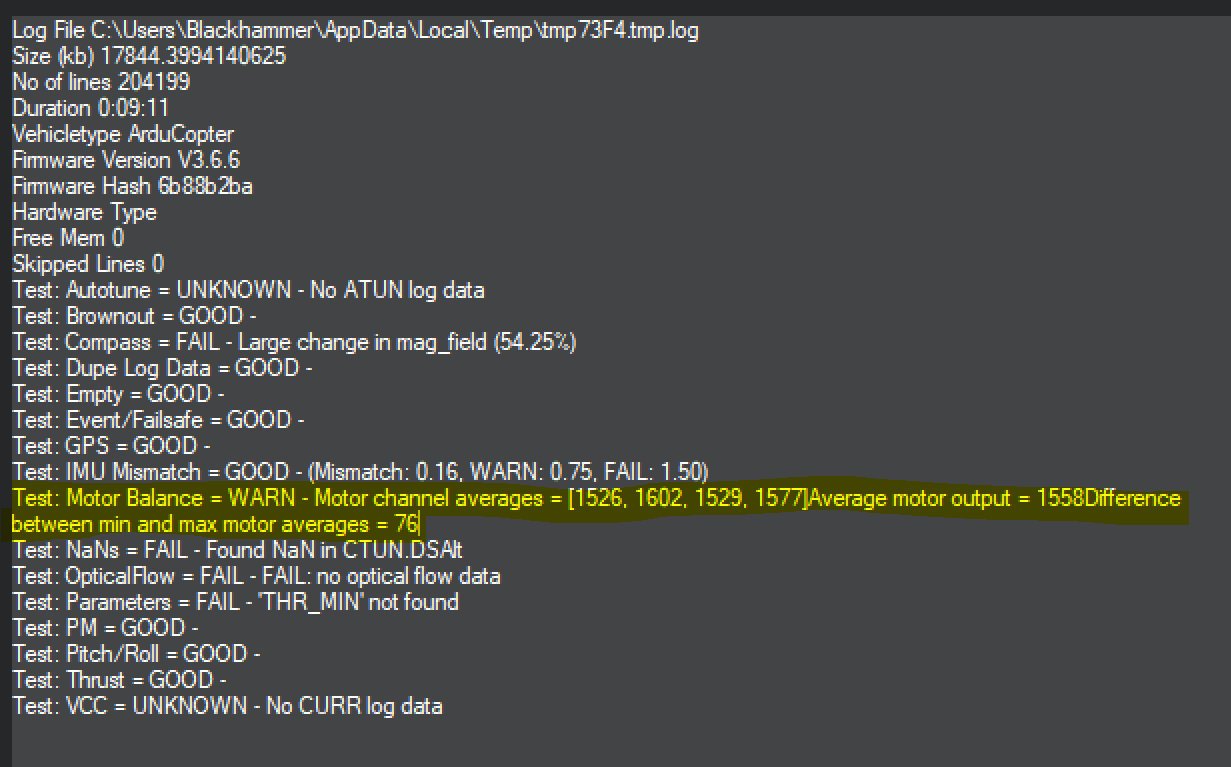
Hello, I have a cube & Daya H4 680mm frame. My copter flies pretty well but I’ve been trying to fix the motor balance warning. A few flights ago I noticed an arm was out of level and after fixing & auto-tuning again I got a few flights without the warning. Now the warning is back, what could it be? I will attach flight logs and screenshot.
The error simply means one motor is working harder than the others. SO, the logic assumes the weigh of your copter is unbalanced. That’s the most likely cause, so check that first.
Otherwise it could be a mechanical issue… See if you notice any reason that motor would be working harder… Bad bearing, not level, etc.
I have the same issue with an hexa. Cout1 is 1506 and Cout2 is 1460. 1 and 2 are right and left, but I am sure that it is well balanced on this axle. Could be this problem because a propeller is slightly turned sideways, I mean, not exactly pointin upwards?
In my experience on a quad, when two motors work harder, my quad is not balanced well on one of the axis, ie. pitch or roll.
But if one motor is working harder then the others it is a usualy a bad alignment of the prop on that motor.
There are some really good motor holders ant there are some not so good, at least.
I had problems with the Tarot plastic mounts, and the behavior was similar to yours. After few flights I got motor inbalance and had to adjust the motor mounts again. Finally I got some metal mounts, and had no inbalance since.
You can also try to put some duct tape (or similar) on the arms. Some people have resolved the problem with it.
HTH
[quote=“andresrc, post:3, topic:39272, full:true”]
I have the same issue with an hexa. Cout1 is 1506 and Cout2 is 1460. 1 and 2 are right and left, but I am sure that it is well balanced on this axle. Could be this problem because a propeller is slightly turned sideways, I mean, not exactly pointin upwards?
[/quote] Definitely. Misalignment moves the motor/prop thrust vectors away from vertical which induces a torque vector and an unbalanced vertical thrust.
If you have Tarot plastic motor mounts, put a single layer of cellophane (Scotch) tape around the arm where the mount clamp is. If RED mounts are slipping, replace them with BLACK mounts. The RED mounts are known to have issues with the threaded inserts pulling out…
Thank you for your replies.
I have made my own 3d printed mounts, and I used a small double side tape, so I think they are firmly attached. But, as the arms are round, the motor/prop could be tilted. I will double check that.