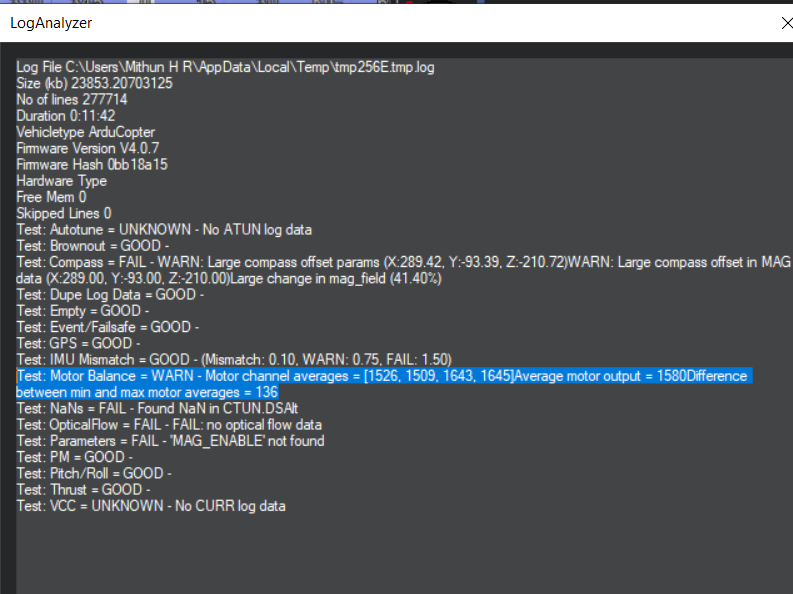
Can anyone help me why am I encountering this.
Motors are mounted twisted in the arms. Please correct that so that all motors can run with the same throttle.
2 Likes
There could be nothing wrong. The Auto Analysis tool is long out of date. You have to do a proper log review.
1 Like
I updated my firmware from 4.0.7 to 4.1.1 and performed the initial parameter setup.
I disable the internal compass and used the external one.
The stability was good.
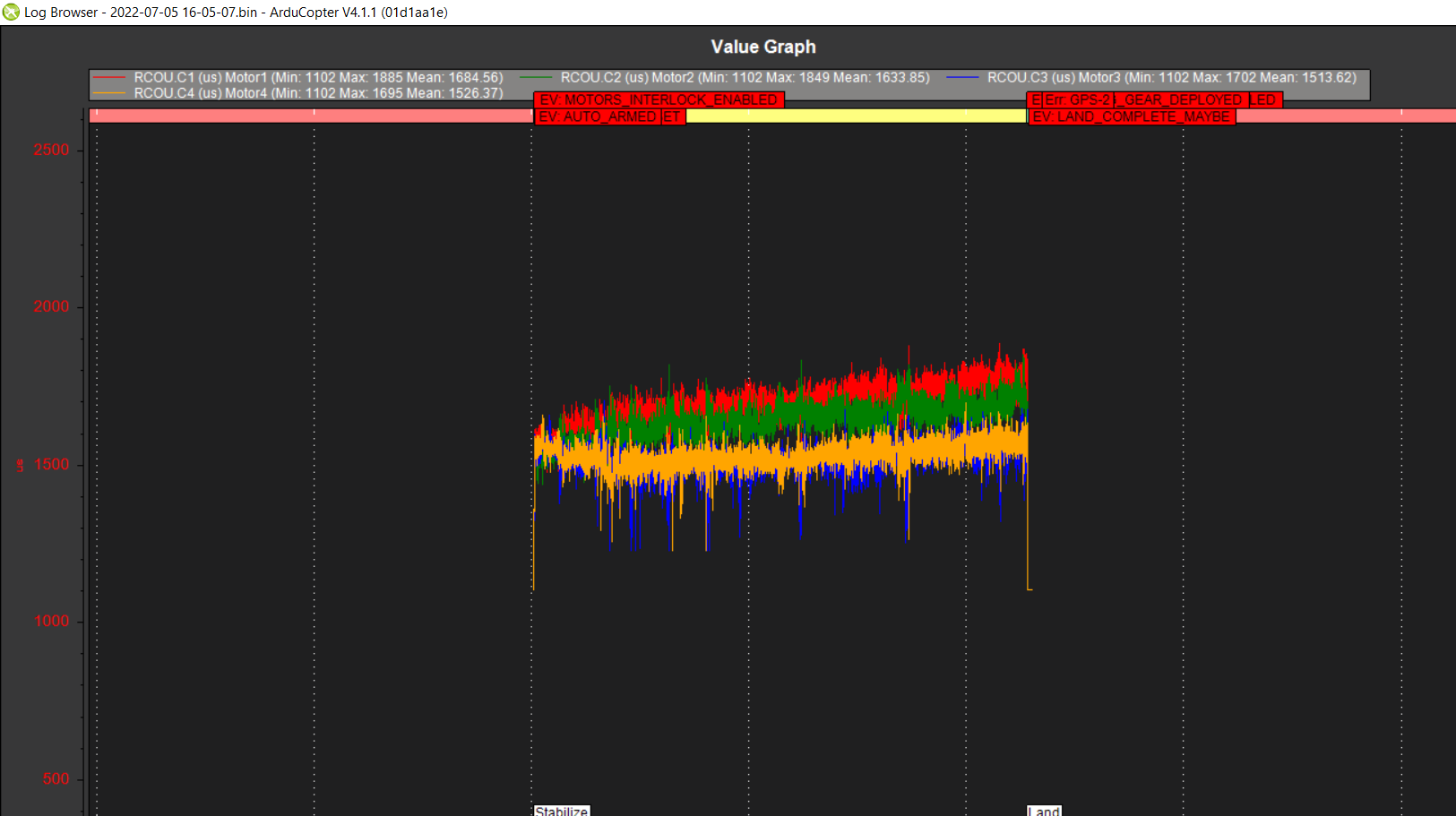
But what is wrong in RCOUT.
https://drive.google.com/drive/folders/1I2q8y8YdKhy5X0dmfxN-Uv9ZujMC99So?usp=sharing
Why? 4.2.2 is latest Stable.
The craft has a mechanical Yaw bias. The CCW motors are being commanded higher than the CW motors. Twisted motor mounts, twisted arms, frame distortion can cause the motors/props to not be level.
1 Like