My Arducopter shows a motor balance issue in the log analysis. (PIXHAWK F450 Quad)
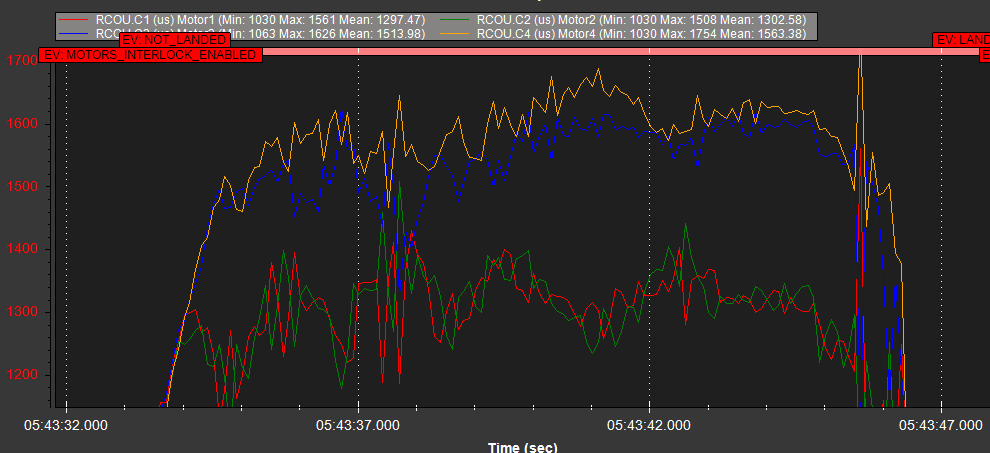
Also in RCOU: the MOTOR 3 & 4 take ~1700 input while MOTOR 1 & 2 are taking ~ 1400 input.
As per look, the quad seems balanced. What might the problem be ?
It might be unbalanced weight if copter.
Center of mass need to be center of copter.
Just check the balance in bench.
Make sure your copter balanced at no thrust.
This is caused by a mechanical yaw bias not a matter of center of mass. The CW motors 3&4 are being commanded higher than the CCW motors. Motors not level, arms twisted or the frame is distorted. Those F450 frames are very poor quality so it could be any of these.