Please remove the 5v for now this is only need to power servos like retracts and or gimble. The best way is to add a standalone Bec pulled off the battery input like this one.
I know you qualify this statement with “in my case,” but it does feel like potentially bad advice.
MOT_SPIN_ARM is sort of like ground idle and allows you to ensure all motors are functional as well as avoid accelerating them to flight power from a dead stop (avoiding component abuse and/or desync).
I recently saw another user zeroing MOT_SPIN_ARM in favor of “safety,” claiming he didn’t want the motors to spin when armed to avoid an injury hazard. Calling a bit of BS on that mindset as well. “Armed” has the implicit connotation of “stay away!” I think I’d rather arm very intentionally and then know that all motors are working prior to a takeoff attempt than casually arm anytime, even when I’m nearby, and then have a potential out of control condition due to one or more motors failing unnoticed on takeoff. One of those situations sounds a lot more dangerous than the other…
I just re-do the Radio Calibration for the 3rd time under your suggestion, the fourth or fifth time since trouble-shooting this issue, but did not change anything,ESCs kept on beeping, motors refused to spin after arming.
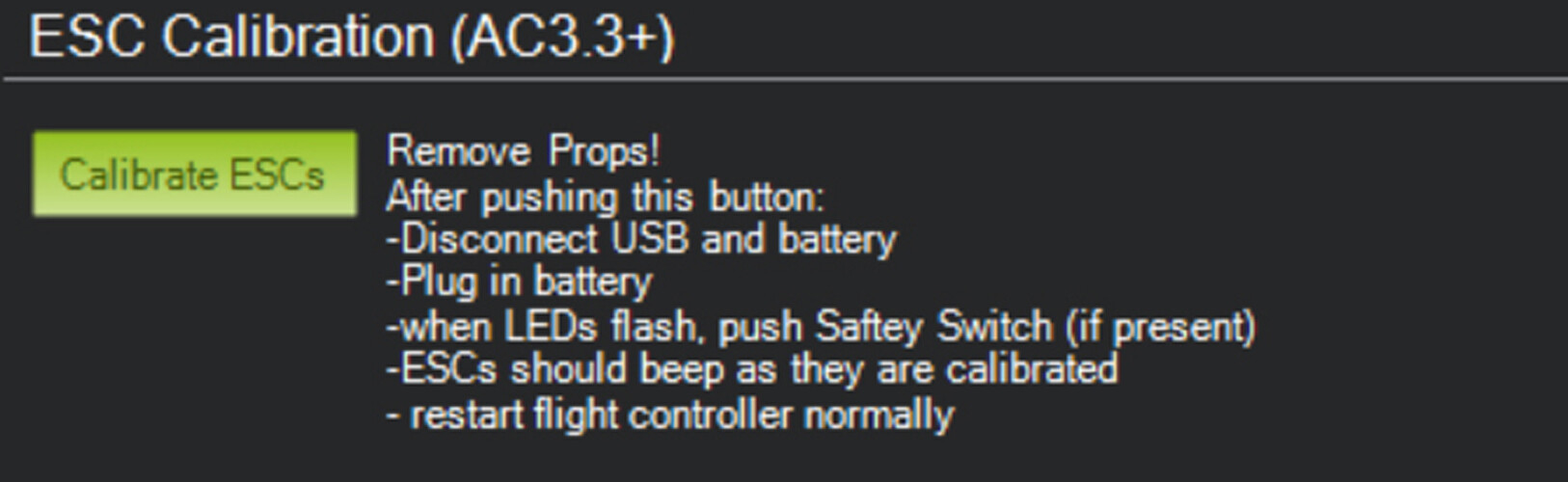
Just curious, during radio calibration, I do not see FC with LED flashing red, never saw this during the 7-8 years doing radio calibration with Pixhawk. Could you give more details ?
Check the RCMAP, throttle is mapped to Ch 3… the first time I ever check this param. This quad was flying normally couple of months ago and since then, I never touch the quad nor change any setting.
“Just curious, during radio calibration, I do not see FC with LED flashing red, never saw this during the 7-8 years doing radio calibration with Pixhawk. Could you give more details ?”
if your not seeing this then something is wrong. See line five below:
You’re the one with Developer in the name, and you seem to misunderstand this parameter.
I’ve posted many of my builds as well, and I don’t understand the need for trying to attack me.
I’ve also explained that my day job is deep in the industry space of incorporating AI into aviation. We just disagree (I thought amicably) about exactly how that can be useful.
I think as a test, move the servo connectors to Aux1 to Aux4 (instead of Main1 to Main4)
and use the MissionPlanner Servo screen to reassign the motor functions to Servo9 to Servo12
Reboot the flight controller before testing.
This will check if the problem is with the Main outputs and the pixhawk itself.
I agree with Yuri - setting the MOT_SPIN_ARM to 0 is potentially more unsafe than having the motors spinning slowly - there would be little to no indication that the copter is armed and could actually go to takeoff power and launch without much warning.
There is the LED and Buzzer, but not everyone pays attention to those or uses them
Please explain my misunderstanding without attacking me personally.
I never attacked your work, and I praised your design. I just don’t fully agree with the specific application of AI that you chose. And that’s wildly off topic.
My post above addressed something within this topic that seemed relevant and worth stating.
If I am factually incorrect, I am happy to learn why.
I did unplug and replug the servo connectors from the FC output during Manual ESC-by-ESC Calibration, also checked the continuity with multimeter after connecting (soldering) the ESCs back to the distribution board. All grounds are connected to battery -ve.
I referred my notes about solution for armed motor not spinning for heli. It was CH8 which is for Motor Interlock. But there is no such param in quad FW.
Eventually, if this issue cannot be solved, I will change the FC, or before that, I will try flashing the FC with Arduplane , then back to Arducopter.
And for your choice of 16 bit ESCs and motors, the defaults work well. I do agree that the defaults should work in many cases, but it seems you are broadly applying your experience and empirical observation in this realm across all other craft.
For 32 bit ESCs and especially with larger motors/props, the default may not be so convenient.
I do the same for 22 props. 320 kV in fact I now believing some of the issues people have is not knowing how to calibrate please read the calibration guide.
Yes your 100 percent right. However i am only talking about Blheli_s not 32. look at the guys post he made. He’s using esc’s that are not calibrating, setting the spin rate is not the answer.
Never a bad idea. Like i said if the FC is not flashing red it will not calibrate with the old 8 bit esc’s using all in one method. Sorry your having issues.