Yes i agree. Thank you. So you know they will spin up without changing the 0.1 spin up setting in Ardupilot after following this video.
Stock settings I use:
Yes i agree. Thank you. So you know they will spin up without changing the 0.1 spin up setting in Ardupilot after following this video.
Stock settings I use:
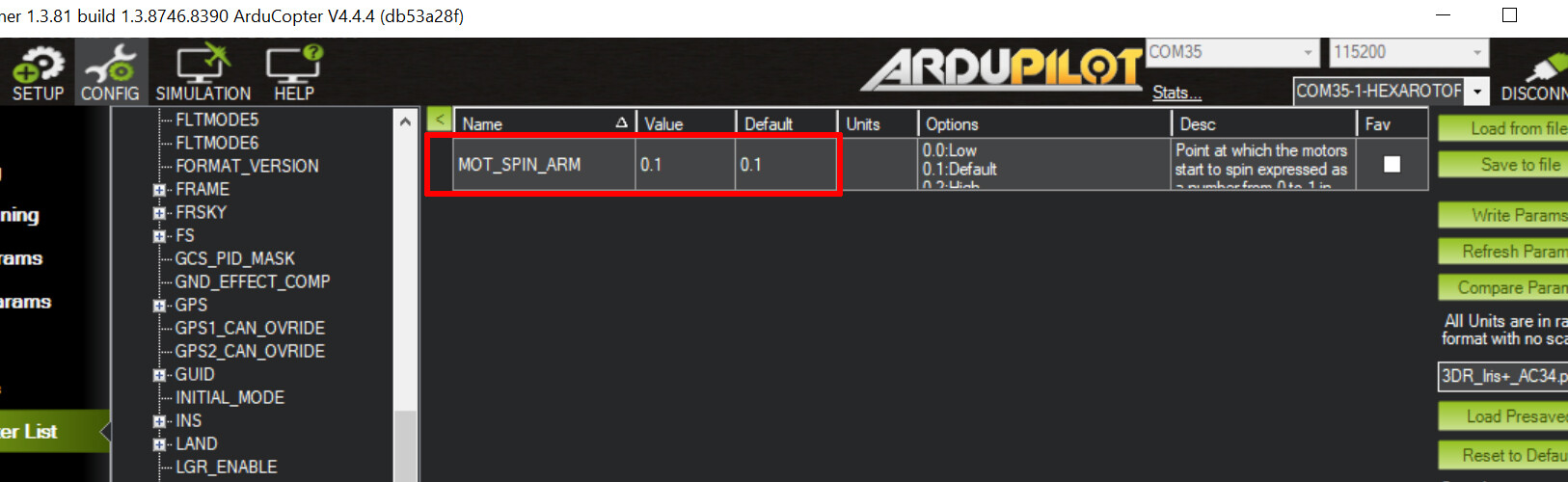
That may be too broad a generalization. Perhaps we should say “should” instead of “will.” There may be some ESC and motor combination that doesn’t quite work on defaults. And it may be preferable to reduce MOT_SPIN_ARM on particularly powerful applications.
For example, I have a little whoop that hovers at 8% throttle. So I reduce MOT_SPIN_ARM to an absolute minimum on that little dude.
I have been setting MOT_SPIN_ARM to 0 nearly since day 1 (6-7 years ago) when I started with Arducopter, motors do spin upon arming every time.
Reason for setting the above param to 0 is because I do a lot of bench testing with many stuff in the vicinity, and not bother to install and uninstall the 4 props frequently in between fling and bench testing. I have built up a habit to watch the LED and listen to buzzer upon arming, and then slowly increase the throttle, paying attention to all 4 props if any one of them spins slower than others, not to mention if one fails to spin. So spinning after arming is not necessary to me.
However, I just changed it to 0.1 in response to Shawn’s advice, in preparation for any suggestion to solve the issue in the next stage.
This is the best test you can do now, considering nothing else has worked so far:
I think as a test, move the servo connectors to Aux1 to Aux4 (instead of Main1 to Main4)
and use the MissionPlanner Servo screen to reassign the motor functions to Servo9 to Servo12
Reboot the flight controller before testing.
Thank you for all you guys in helping to solve this issue so far. One thing to tell pretty fast if a suggestion will work or not :–
After doing whatever is suggested to try, as soon as I plug in the flight battery to power, ESCs keep on beeping non-stop, and never initialize with tones acknowledging the NO. of cells in the battery, and without advancing the throttle, I know the trial would fail.
HURRAH HURRAH Issue solved
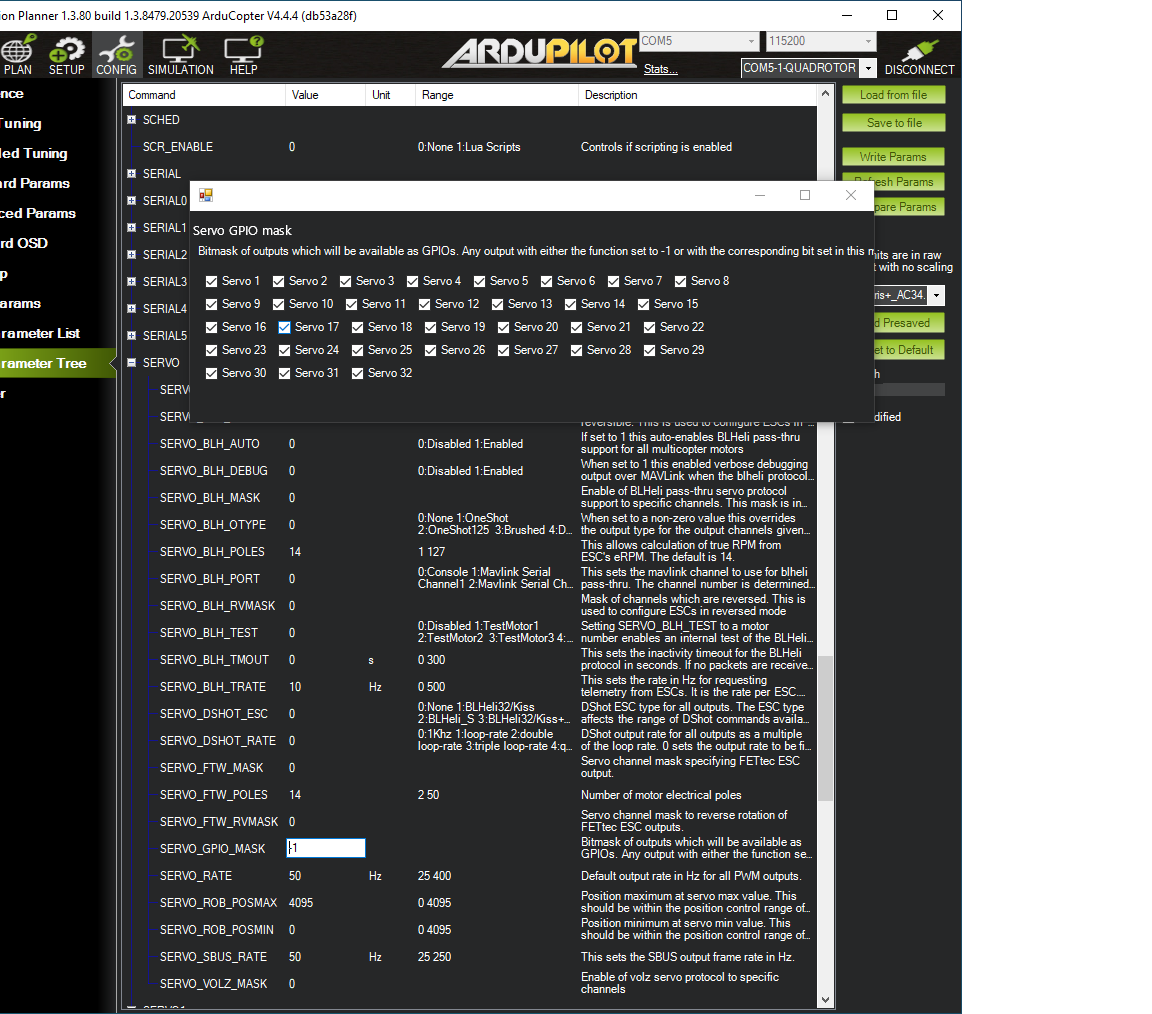
Culprit is the GPIO setting. When moving the 4 servo connections from FC Main OUT (1-4) to AUX 1-4 under Shawn’s suggestion, it reminds me to check the GPIO setting because I have changed the values so some of the outputs are used as GPIO for connection to HC-SR04 ultrasonic sensor as Obstacle Avoidance experiment.
Upon checking the value of SERVO_GPIO_MASK, I was surprised to see ALL the servo outputs were changed to GPIO, which is never my intention (see attached). I only need 2 output pinset (Trigger Input and Echo output) from FC for HC-SR04.
After correcting the values, as soon as I hear the normal initialization sound of ESCs after plugging in the battery, I know the problem would be solved.
As I said in the thread, unless I changed the parameter “Unintentionally”, and I do not know when I did this UNINTENTIONALLY.
Anything, thank you all guys.
For the record and my setups used for years now, I just keep the defaults in case anyone is reading my post wrong. Default is " 0.1 " for MOT_SPIN_ARM.
. BTW did you remove the BEC? If you have the funds I would replace the esc’s for a 32 bit 4 and 1 like I posted here: Amazon.com I would also wipe the Parmas clean and start over after a save make sure your radio is working and calibrated please visually check.,
Before removing the BEC from one of the 4 ESCs, and replaced it with a standalone BEC, I will have my buddy, who is an electrical engineer owning an oscilloscope, to check on the quality of power supplied by BEC built-in in an ESC, and compare the power quality supplied by a standalone BEC.
Usually, power from BEC of a ESC is clean enough as long as the circuit is not shared with video transmitter.
Much appreciated.