What flight controller, motors and ESC are you using?
Hi andy,
FC is Pixhawk 2.4.8. Motors are Topseed S2313 920KV. ESCs are clone.
If you refer to my previous messages in this thread, I indicated that after Manual ESC-by ESC Calibration, and bypassing the FC, using the same Rx and Tx,
motors can spin. Also in the normal setup, after arming, advancing the throttle will progress all the 4 PWM status bars from left to right in the Servo Output page of MP,
but motors did not spin and ESCs keep on beeping.
These are strong hints that motors and ESCs are working normal. Once they pass through the FC, then this weird scenario occurs.
Thank you for yr support.
My guess is that, when armed, the lowest PWM value output by the FC is higher than the minimum of the ESCs. A radio and servo calibration using the FC may fix this, but I have - on occasion found that I must use a servo tester to get things started. My servo tester has a digital readout, which is nice, but not necessary. I would take the props off and connect a servo tester to one motor. Turn the servo tester to the 3/4 position, before applying power. Connect the battery and wait for the first series of tones. Then turn the servo tester to the 1/4 (but no less) position and wait until you hear the tones again. If your servo tester has a digital readout, set it to 2000uSec before applying power and after the beeps, turn it to 1150uSec or so. Disconnect the battery and hook the motor to your FC. Now try to arm the flyer. If the ESC you calibrated works, do the same for the others. After you are done, first do a radio and then an ESC calibration through the FC to make certain all the ESCs are calibrated the same.
You need to set:
BARO_OPTIONS,1
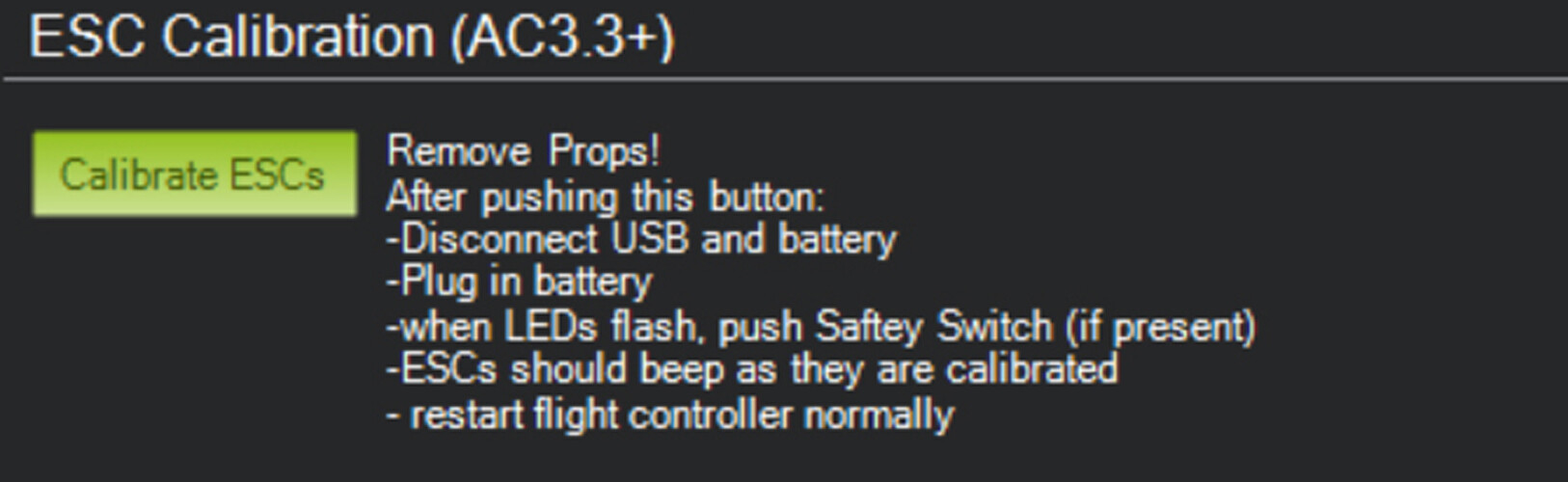
And this procedure should work for calibrationg the ESCs
https://ardupilot.org/copter/docs/esc-calibration.html#semi-automatic-esc-by-esc-calibration
I do not have a servo tester. I think what you suggested me to do is equivalent to the Manual ESC-by-ESC Calibration which I did,
by detaching each ESC from the FC and calibrated them (max throttle before switching the Tx ON and applied power to ESC) one by one. Each motor did spin after calibration. By after re-hooking all ESCs back to FC, and armed, motors still failed to spin.
Hi Shawn,
I do not understand why the type of barometer has something to do with motor not spinning after armed.
I tried all the 3 types of calibration, including Semi automatic calibration, but failed to spin the motors after armed.
Thank you for your help.
If Motor Test doesn’t work it could be a wiring problem.
And this isn’t right from your parameter file:
AHRS_EKF_TYPE,2
You asked about the prearm message containing _MAX and the baro setting will fix one of the things that will allow the copter to arm.
He has taken this approach:
ARMING_CHECK,0
Analogous to pulling the fuse for this lamp ![]()

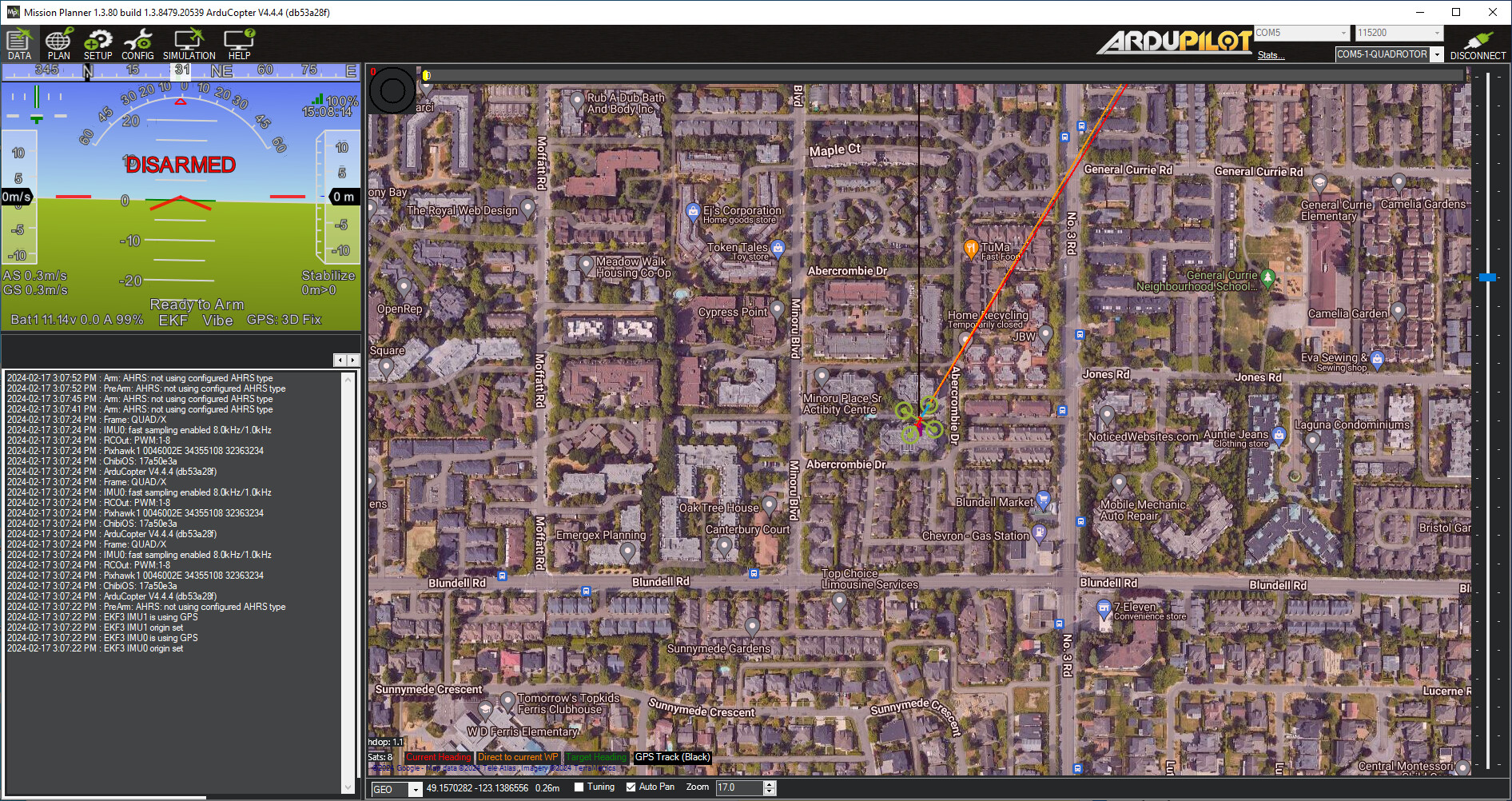
My current AHRS_EKF_TYPE is set to 3. You suggested I should have set it to 2.
I just tried that, with error pre-arm message saying “Not using configured AHRS type”. See attached.
I swear I did not change any wiring since last flight which was normal.
Thank you.
It is set to 2 in the parameters file you posted above. I was pointing out it was wrong.
The barometer setting just allows treating MS5611 as MS5607, different model of barometer. This setting does not affect arming, as I can arm without problem.
In fact, I did try changing the Baro setting to 1, but still fails to spin the motors after armed.
Arming is not required for Motor Test. If they don’t spin there (try increasing throttle %) then something fundamental is wrong.
I have been using this approach On and OFF (disabling the arming check) for many years without problem.
Reason is so that I won’t be denied arming because of compass variance when there are 2 compasses, or board out of board voltage.
If those vital params are healthy before take-off (GPS fixed, compass checked on monitor by turning the quad manually and you fly line-of-sight in Stabilize mode), you do not need pre-arm check. You need it if you fly auto and out of sight.
Yes, I realise arming is no required for Motor Test. I did the Motor Test last week and increased the throttle % to 20, stll failed to spin the motors.
But what is this “fundamental” ?
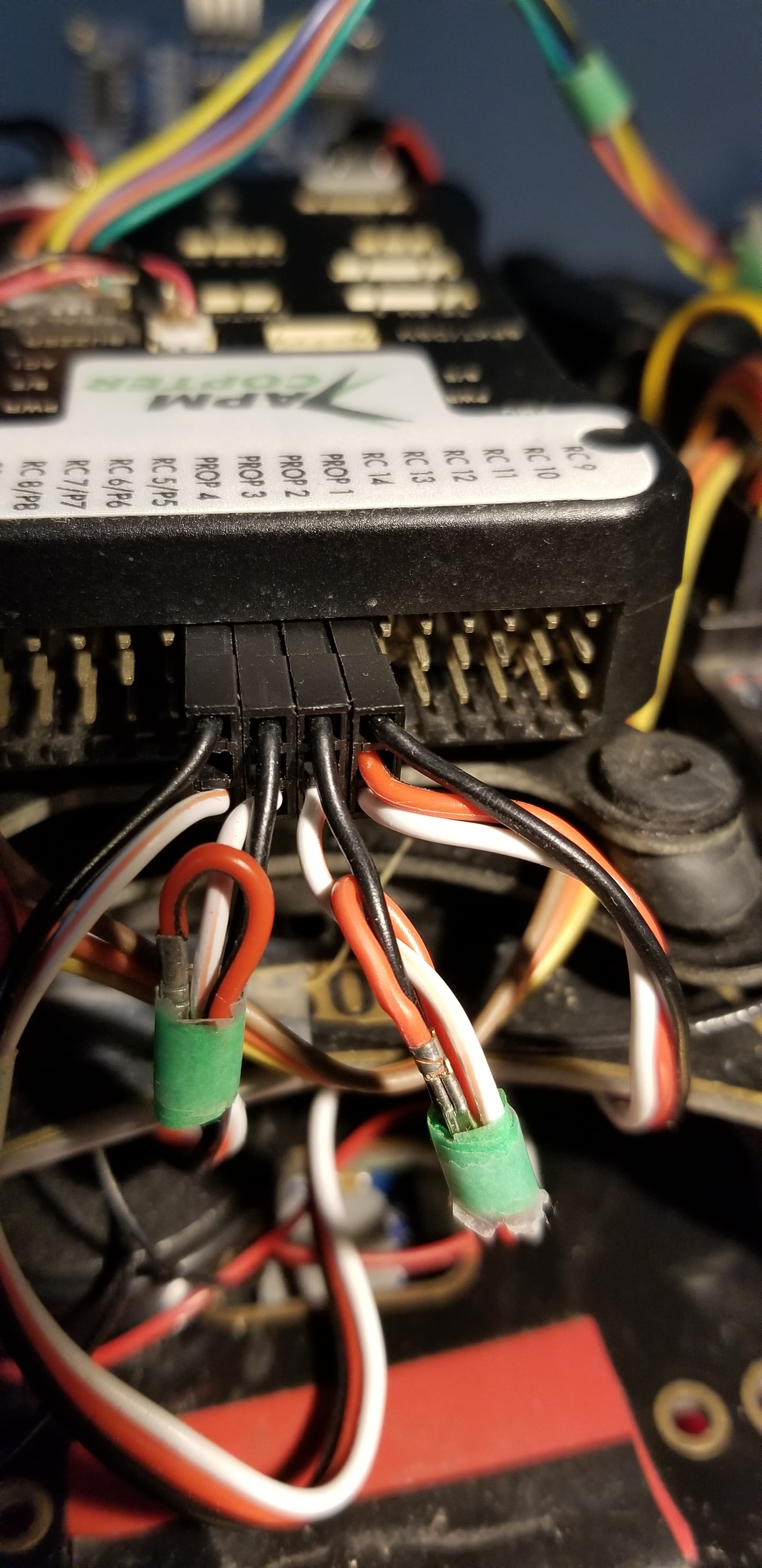
Please provide a photo of your flight controller and wiring to the ESCs - that may identify the issue.
Set LOG_DISARMED,1 and try a couple of motor tests
Send that .bin log then set LOG_DISARMED,0
Photo showing 4 BEC plugs of ESCs connected to Pixhawk output, with 5V wire on only the far right cable.
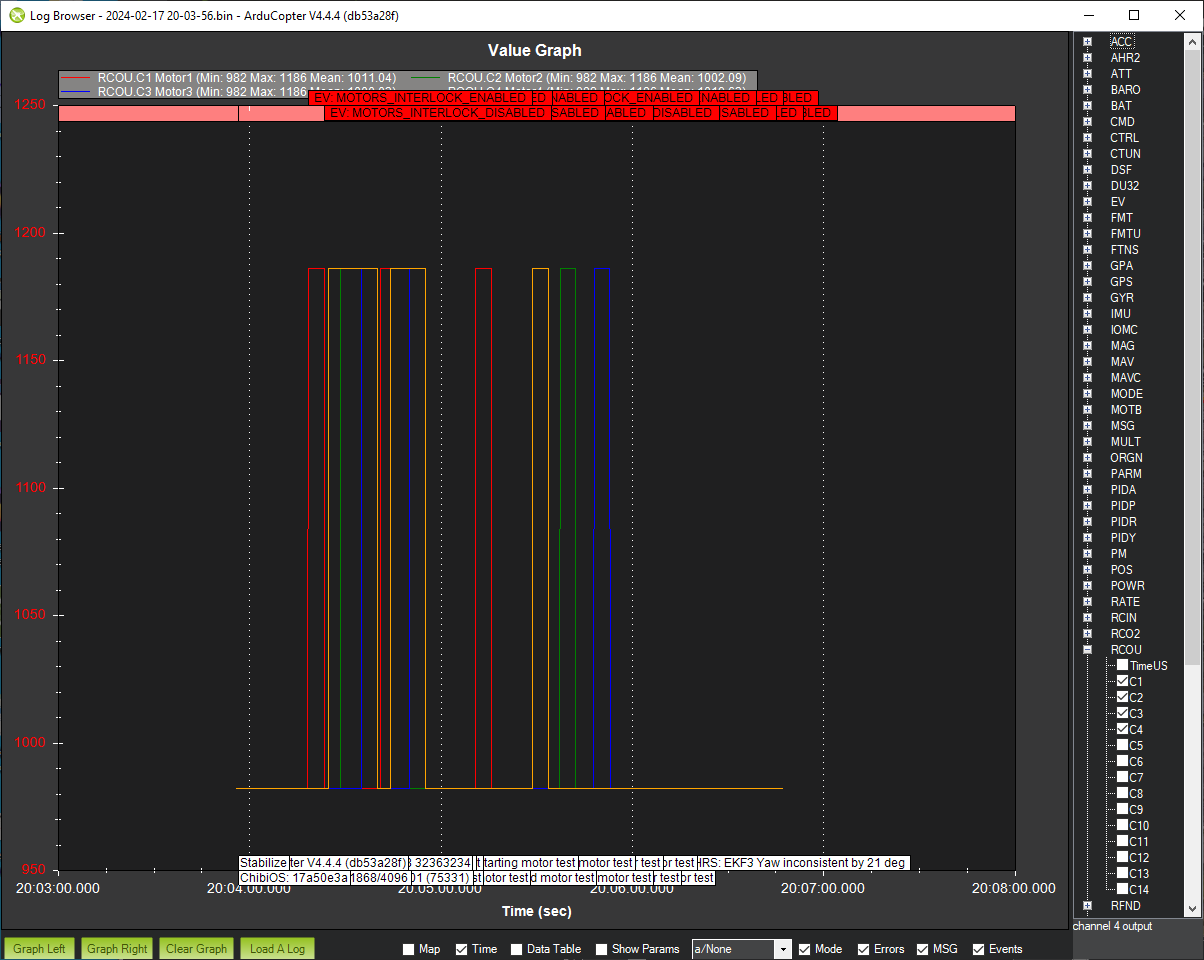
.bin log of motor test attached :-- (20% throttle)
Extract of RC OUT from .bin log also attached for yr convenience :_
The photo shows your wiring as being correct, so the ESCs should work if they have power.
Maybe unplug and replug the servo connectors??
Test continuity with a multimeter.
Test all grounds are connected to battery negative.
These wont affect the motor issue, but run the Initial Parameters part in MissionPlanner, which will set the Gyro filter and a few other things correctly. Then set:
INS_ACCEL_FILTER,10
and I would also set these as a starting point, just so we all know they are fairly standard:
ARMING_CHECK,1
LOG_BITMASK,180222
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
MOT_SPIN_ARM,0.10
MOT_SPIN_MIN,0.13
MOT_SAFE_TIME,1
I did read where you mentioned arming checks and MOT_SPIN_ARM - I’m just thinking we start with values that almost everyone uses. Once it’s all working OK you can make adjustments - if something stops working then, you have found a bug ![]()
I’d reduce the logging too, at least for now, since I for one cant properly process all that extra logging, and it’s not helping us now.
I have done that with the battery connected and the esc’s should make a tone during reconnection.
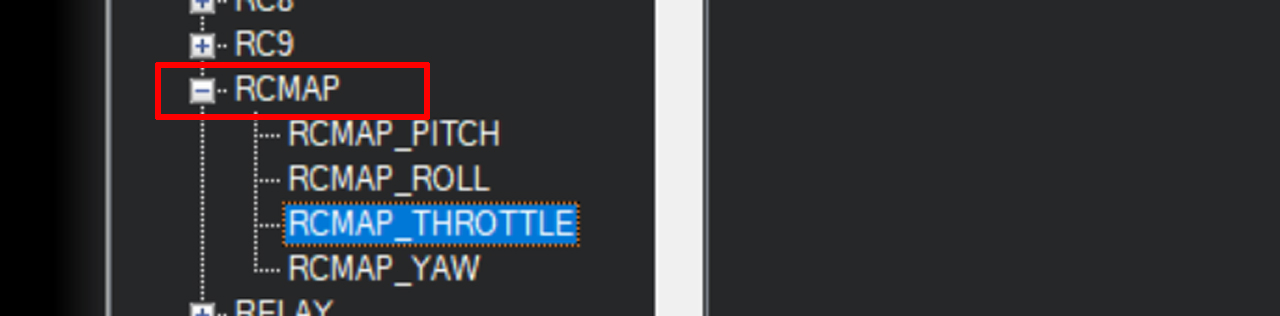
If the ESC’s are working and calibrated in my case no MOT_SPIN_ARM is needed ever. I go back to a re-do Radio Calibration. the FC must flash red with a long tone. Make sure you follow the instructions and unplug in the correct order. The radio must be calibrated and the correct inputs selected. Some of the old Pixhawks will have the inputs mixed in a odd way like throttle can be input 3 and not 1. Simply check and change if wrong. There is no shame to reset the Params.
Use this after reversion to Defaults.
I believe the confusion is BLHel_S is acting like a normal PPM and confused into giving only a partial calibration broken and not like a 32 bit.