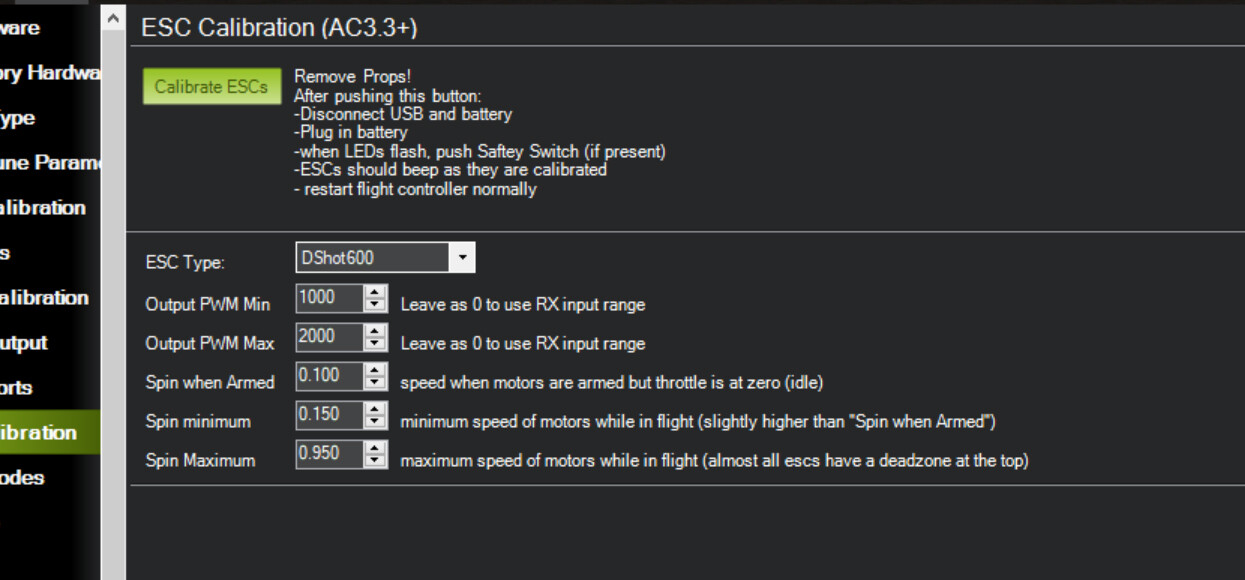
MOT_SPIN_ARM set to 0 for safety reason so motors do not spin when armed. Have been doing this over 7-8 years ago when I first used Ardupilot.
I did not touch this setting and he quad works alright with this setting for many years.
Anyway, I just tried setting MOT_SPIN_ARM to 0.03, and as expected, did not help.
This usually means that the ESC is getting power but no signal. Strange that all 4 motors are doing that. Is it a constant beep? Are these ESCs PWM or Dshot?
It is constant beep. ESCs are all pwm. I agree that beeping means no signal received, but I got the green bars of all 4 motors moving in Servo output page as I increase throttle after arming.
Regardless of the ESC firmware or protocol used the MOT_SPIN_MIN parameter should be set as per the “Setting the Motor Ranges” Wiki guide and detailed in the Tuning Blog Post your fellow Developer @amilcarlucas directs users to everyday. Are you suggesting these guided are wrong?
Something is wrong do you think i need to set arming spin rate in motor test so high it generates an error? My thinking is The BLHeli_s is broken and the best way to calibrate as I have described. That’s the same way i got Tim running. Also the calibrate wiki is now wrong as well. Dave If you need hardware to test on your bench I will ask that you get approval. Proposals - ArduPilot Discourse
BTW I more than happy to vote for you and x as fellow Developer.
I have just tried 3 different ways to calibrate the ESCs on my quad,All-at-once calibration, Manual ESC-by-ESC Calibration and Semi Automatic ESC-by-ESC Calibration. All these fail to start the motors after they are armed.
For the Manual ESC-by-ESC Calibration, I detached each ESC from the FC, ie Tx > Rx >ESC> Motor. And after calibration, motors can spin. But after connecting all ESCs back to the FC, same thing happened…motors do not rotate after armed.
Please be reminded that in Servo Output page of MP, the pwm green status bars for the 4 motors progress from left to right as I increase the throttle, meaning there is signal output from the FC to all ESCs, so I don’t think the problem is related to ESC calibration.
I also updated the fw from AC v4.4.1 to v4.4.4. But this does not help.
The param is re-attached for whoever can offer help to trouble shoot this very weird scenario.
Thank you, Quad param__armed_not rotate.param (17.4 KB)
Can you check to see if your servos are activated? I have noticed a small bug that after a frame selection they can show they are are not activated. Simply redo the frame type or select the servos and select motor1 motor2.
" And after calibration, motors can spin." did you have to increase Spin when armed ?
Not sure did you say what ESC are you currently using?
I was not able to. but let’s try that after we test stock. What I am seeing is a incomplete calibration right now with a new BLHeli_S. that needs a Radio calibration to work correctly.
I unplugged one of the ESCs (the one with +5v is left connected to Pixhawk output) from Pixhawk output and in it place, I plugged in a servo and arm the FC, servo is not activated when advancing throttle.
Also re-did the frame type… changed it to other frame type and changed back to quad again, to no avail.
Yes, after Manual ESC-by-ESC Calibration, I did increase the throttle after armed, and motors spin, that is by-passing FC.
I also re-do Radio Calibration. But it did not help.
ESC are clone no-name brand. All the signs show that problem is not related to ESCs and calibration. I have been using these settings for over 4-5 years. Since the last flight couple of months ago, I did not change any setting.
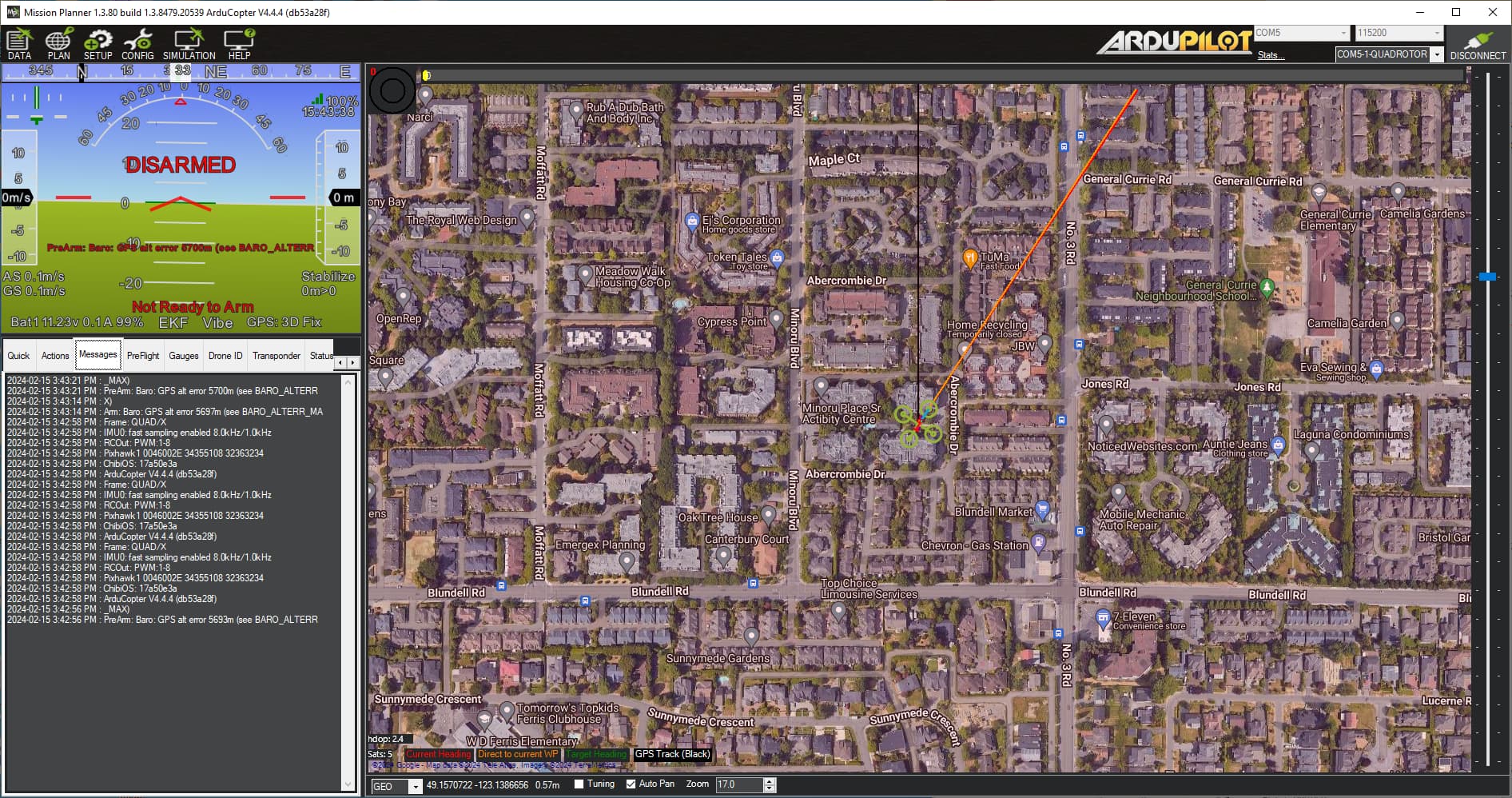
I enabled the Arming Check (it had been disabled) to see what message may give a hint. Attached is a screen shot showing the message tab after arming. One message is “_MAX”, not preceded by Prearm. Any idea what this is ?
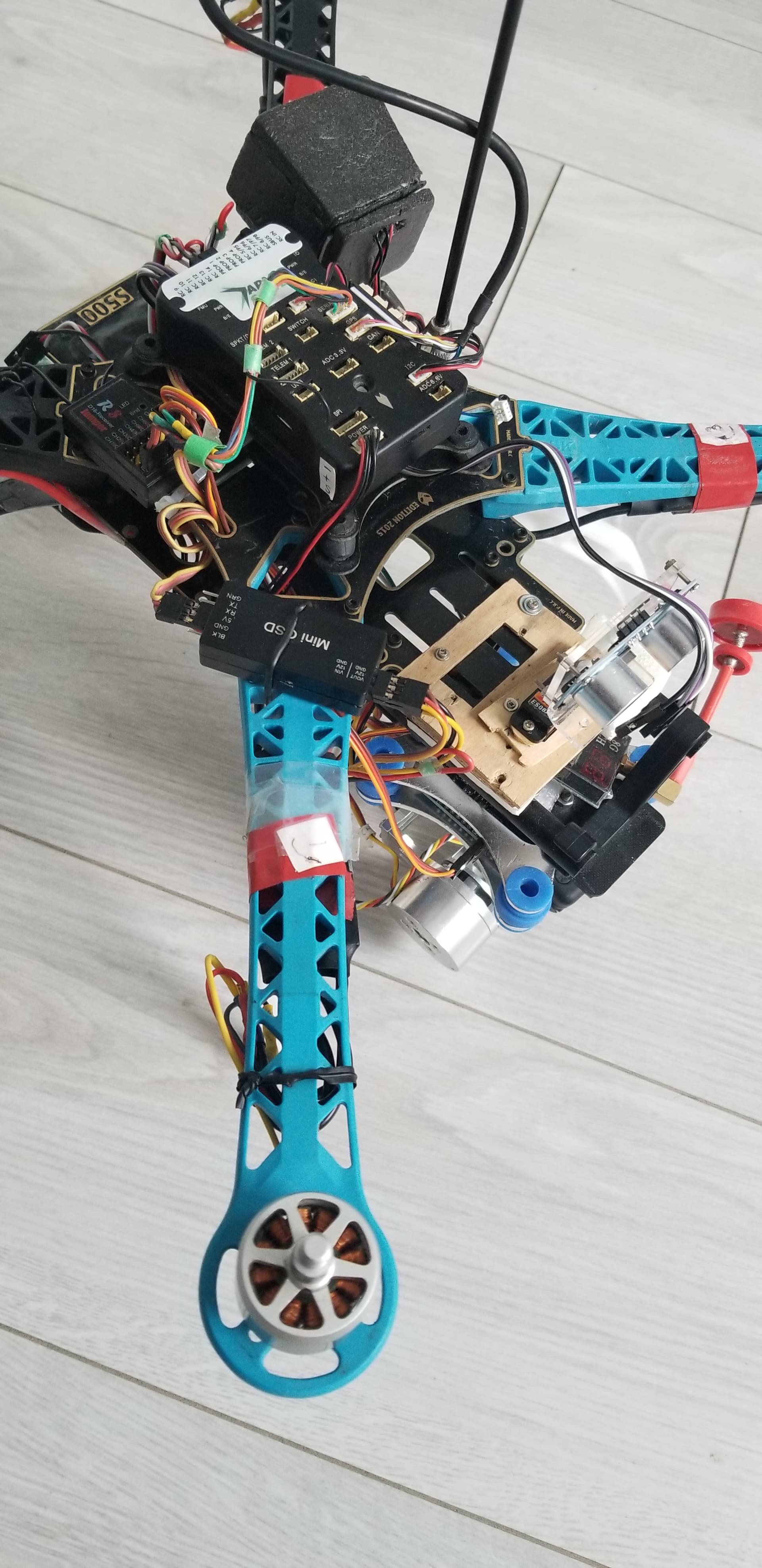
FC is Pixhawk 2.4.8. Motors are Topseed S2313 920KV. ESCs are clone.
If you refer to my previous messages in this thread, I indicated that after Manual ESC-by ESC Calibration, and bypassing the FC, using the same Rx and Tx,
motors can spin. Also in the normal setup, after arming, advancing the throttle will progress all the 4 PWM status bars from left to right in the Servo Output page of MP,
but motors did not spin and ESCs keep on beeping.
These are strong hints that motors and ESCs are working normal. Once they pass through the FC, then this weird scenario occurs.