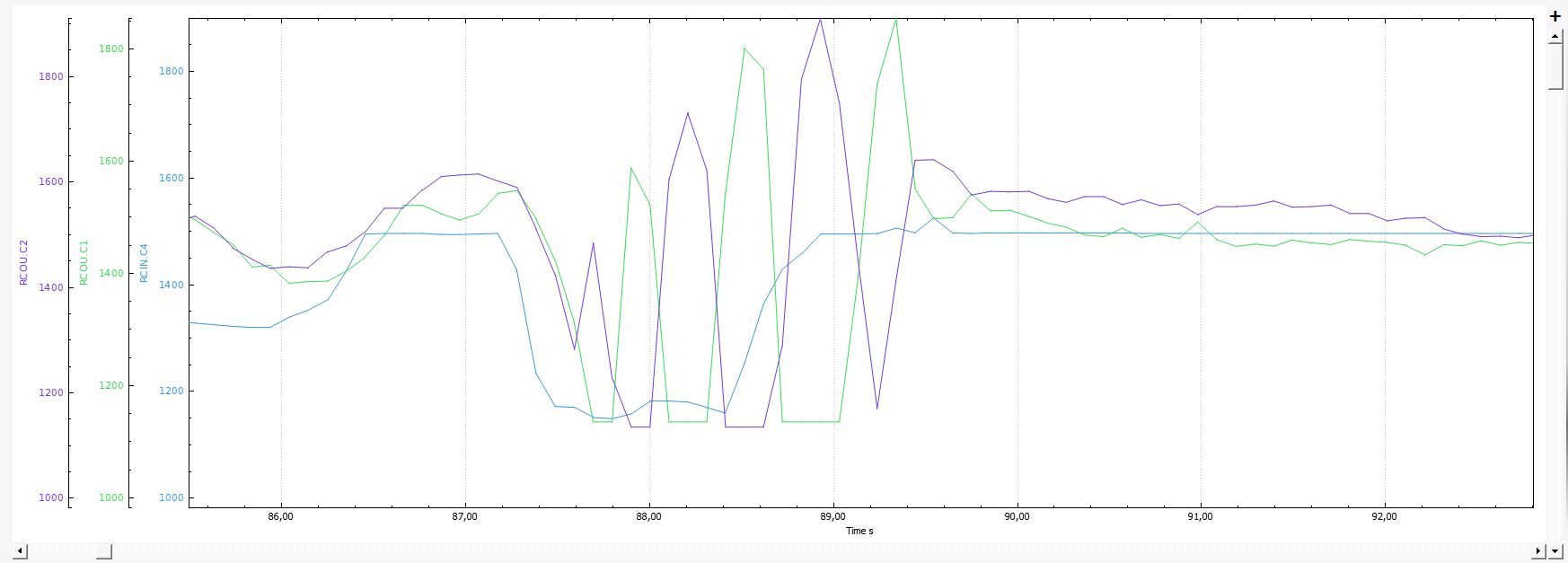
Hello, I had a strange behaviour the other day with my drone. When I took off and I did a YAW movement, the drone started to shake and later it recovered, I continued fliying and all was almost ok, because in some moments it shaked it again. I have seen that in some moments, motor 1 and 2 mismatch and the pwm is opposite but later are good again.
My quadcopter setup is:
Motor: T-Motor u7 420kv
ESC: Hobbywing x-rotor 80A
Props: 15x5.5
Battery: 6S 16000mAh
FC: The Cube Pixhawk 2.1
I can’t find the real problem of the drone, so does anybody know what could be?
After taking a quick look at the log, it seems to me to be a bad tune problem. Try doing an autotune.
On the other hand I don’t know what you mean by “motor 1 and 2 mismatch and the pwm is opposite”, there’s no such thing. The graphs you showed are the ones corresponding to the Roll and Pitch, they have nothing to do with the PWM outputs of the motors.