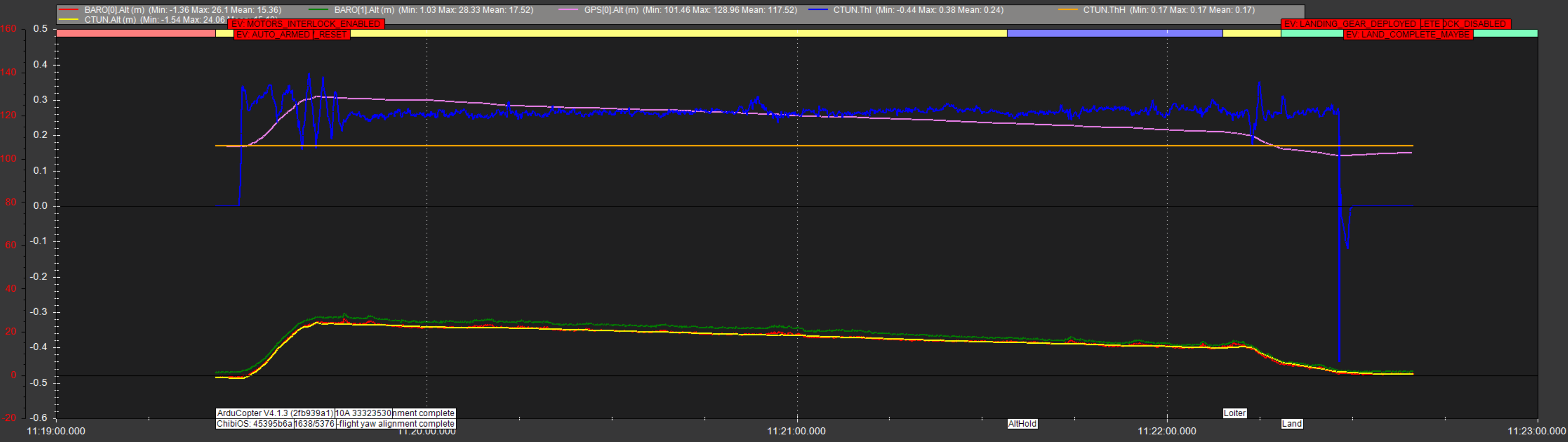
This is the first time I have had this problem. Not sure what to point toward. Currently I am having trouble with 2 new units holding altitude. Normally, I will keep the MOT_THST_HOVER at the default 0.2 and have MOT_HOVER_LEARN set to 2. This has always allowed the autopilot to calculate the correct hover point, and holds altitude great. Image of the constant CTUN.ThH is below:
Does MOT_THST_HOVER end up changed after hovering in ALTHOLD for a while?
Set it lower like 0.1 and hover for a while in ALTHOLD and see if it changes.
MOT_HOVER_LEARN,2 is normal and I’ve never had an issue with it.
No i tried hovering in ALTHOLD for about 2 min. It was losing about 0.1m/s in altitude. I can try to adust the value lower. I hover at around 0.25 and had it set at 0.17 and it would lose altitude at a faster rate. around 0.3m/s.
Seems like all of this happened when I tuned in 4.0.7 and updated to 4.1.3 after a few flights. Have you had any issues with 4.1.3?