I took it out for the first tuning test and I didn’t dare take off because the rear was lifting quite a bit more than the front:
I didn’t notice any oscillations visually or audibly, so I think it looks good, but I didn’t realize until I got home that the battery, when I affix the three velcro straps that hold it on, is not weighted properly. The front is heavier than the back, so I’m pretty sure it explains why the rear end tends to lift up more than the front. Otherwise; everything else, as far as I can tell, looks good to take off and set it back down. I’ll just have to figure out a way to move the frontmost battery strap, because when I center the weight of the battery on the x8, the front strap isn’t being used and I don’t trust only two straps to hold it properly.
I have at least a day to work on it before the winds slow down to 5mph according to forecasts before I will try it again with the battery more toward the back and balanced better.
It starts to lift off the ground when the throttle gets to about 40%.
I plan on using the video as part of a tutorial for YouTube to help others in their tuning process.
I have looked at your log and it appears like you are feeding input into the aircraft as you go to take off.
Just make sure you are on a flat surface and slowly increase the throttle until it comes off the ground. At any time you can drop the throttle back to zero to get it on it’s legs again. It looks like everything is in the right direction. I suspect that you just need to get the feet off the ground.
Just slowly increase the throttle until the legs come off the ground and you should be fine.
You are also correct to do your best to move the CG directly to the middle of the aircraft.
Something strange about when I enter the values given by the spreadsheet… When I enter my value (“18” in this case, but happened on my other copter too) for ATC_RAT_YAW_FLTT, Mission Planner pops up an Out of range warning: “ATC_RAT_YAW_FLTT value is out of range. Do you want to continue?”
Should I be alarmed?
This also happened when I entered the value for my other copter…
I’ve now tested the X8 a few times. It flies amazingly well, especially considering it’s not even tuned yet. I have completed the AltHold learning process by flying it in AltHold mode for at least 30 seconds, and in fact I did it twice and let it hover without stick input for at least 30 seconds on the second time. I went to:
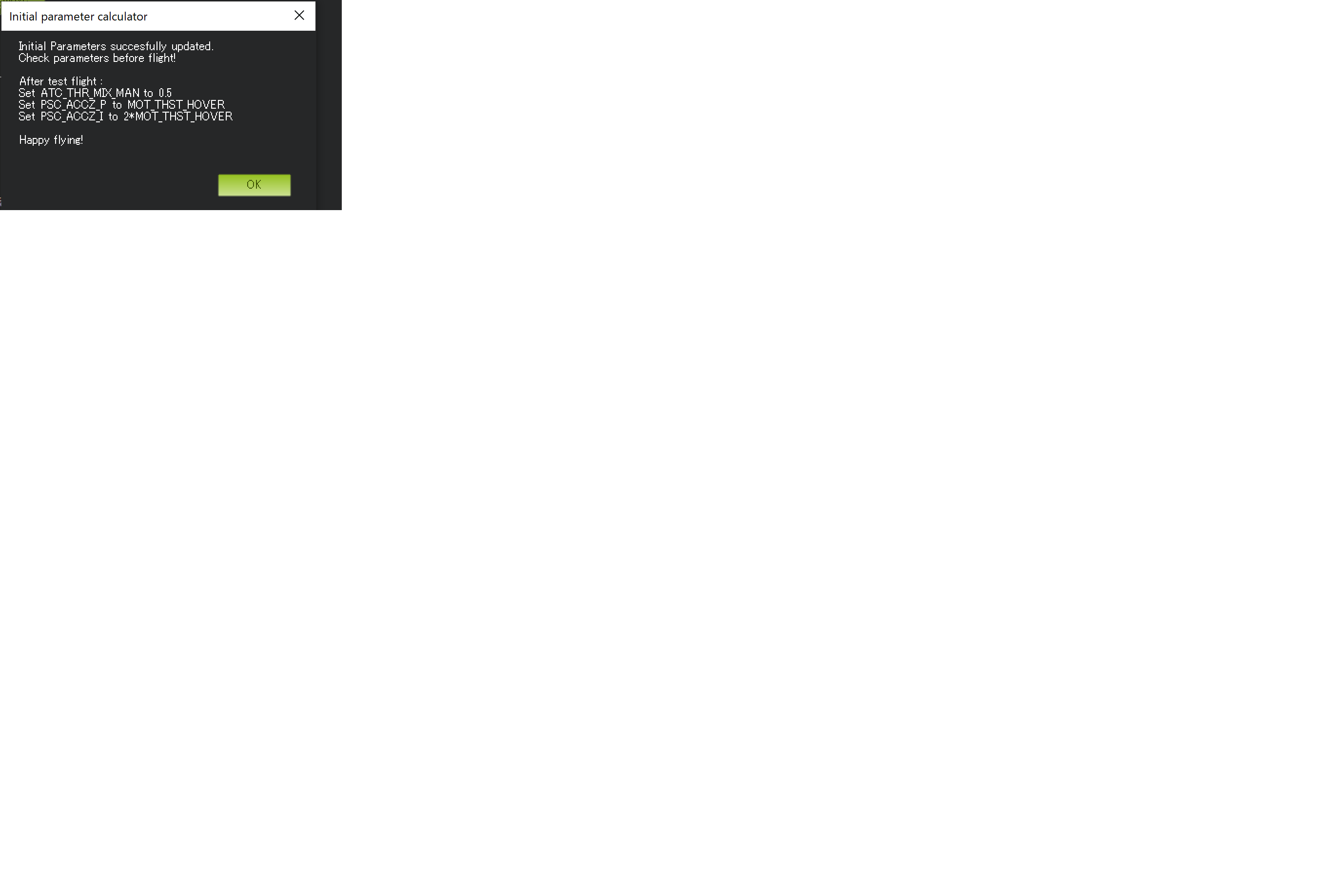
Blockquote 1. Set these parameters on ground and preferably disarm (A confident pilot could set them in flight with GCS or CH6 tuning knob):
I set my PSC_ACCZ_I to be “0.33818” (2x MOT_THST_HOVER) and was about to set the PSC_ACCZ_P to be “0.16909” (my MOT_THST_HOVER.) However, when I did, Mission Planner popped up an alert box saying “PSC_ACCZ_P value is out of range. Do you want to continue?” Should I continue? Or does this seem way off? the difference between .5 and 0.16909 seems drastic, and considering how well it flies… I’m hesitant to do it yet. It does drop pretty drastically when I change from AltHold to Stabilize mode, as can be seen in the video:
What I see often is that high powered aircraft have some oscillation in Althold. For Autotune it is good to have a very stable AltHold so it does not put extra inputs into the aircraft during the tests.
You can think of those numbers as good numbers during Autotune and a low safe value. You could move them back up to the default if you like that better. However I would test it during fast flight and breaking maneuvers before you decide on your final numbers. Often you will only see problems in breaking maneuvers where the aircraft pulses.
Thanks Leonard. I did set them back to defaults, because my braking worked well and didn’t notice any oscillations or anything weird, and as can be seen in the above video, I flew it pretty much full speed left and right. so I think it will be fine.
I’ve got it all ready to Autotune again tomorrow if the wind isn’t too strong:
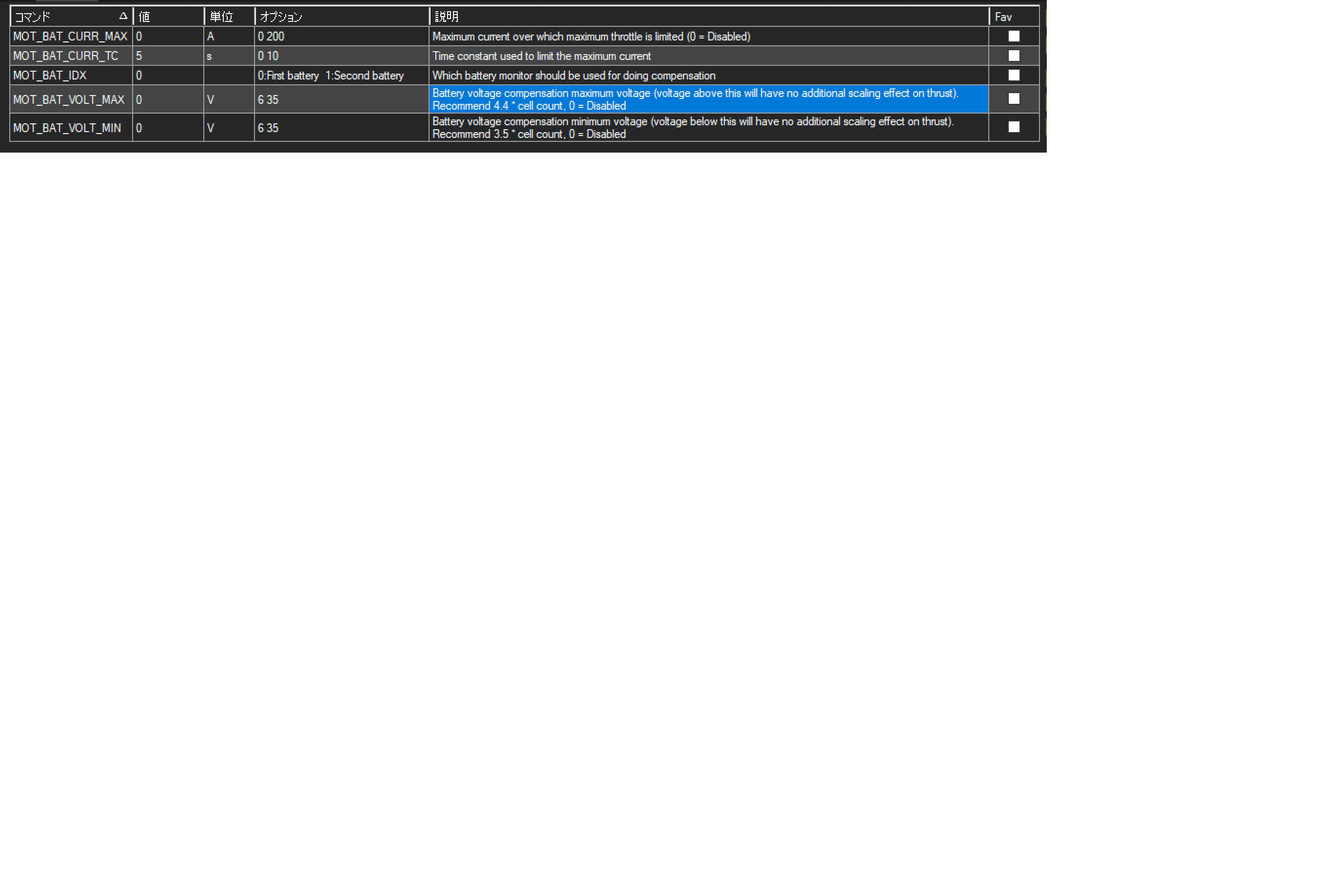
In the description there in MissionPlanner it is more generic and suits ordinary Lipo cells in this case.
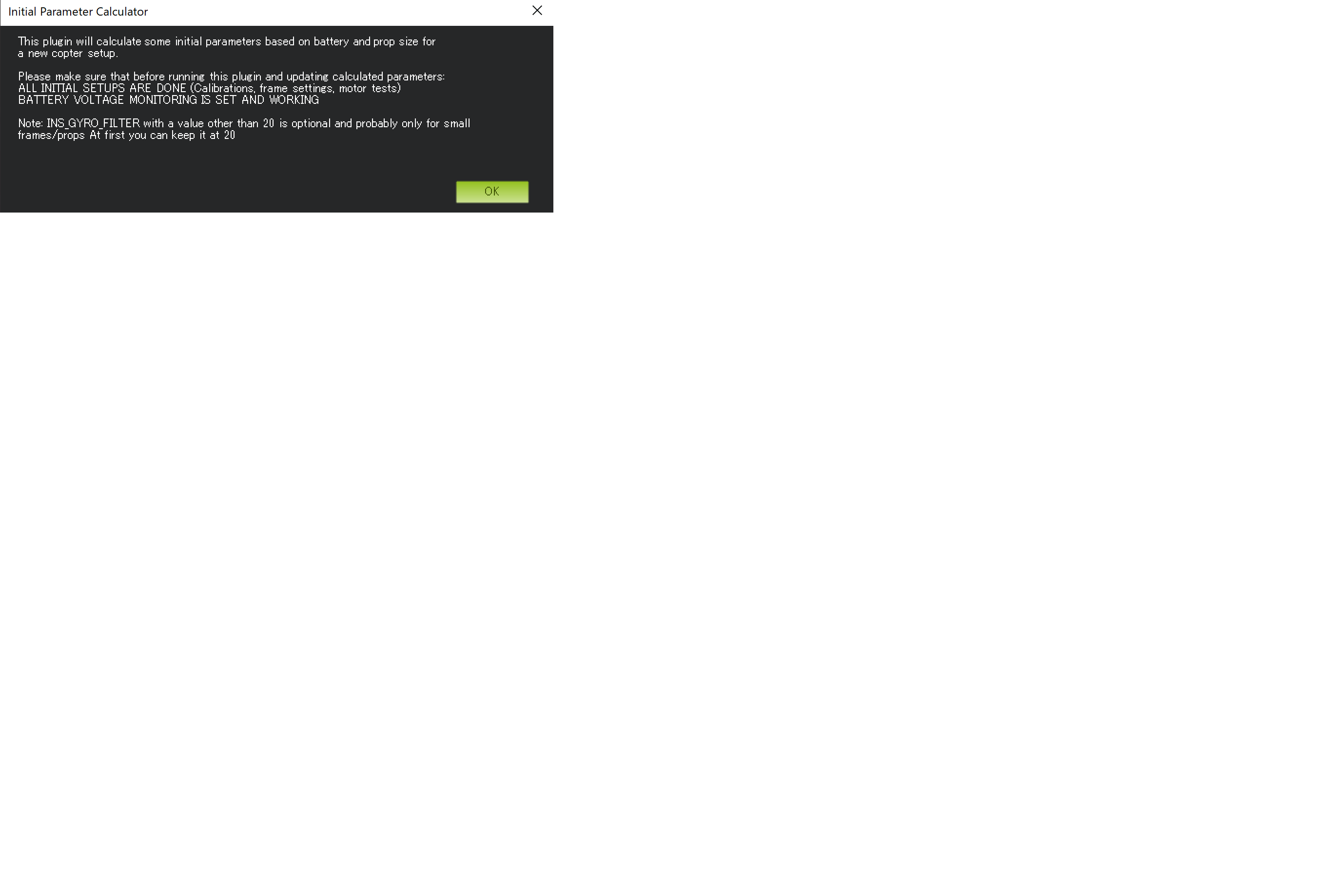
If you connect the flight controller to MissionPlanner and press Alt A the dialogs step you through setting those values correctly and offers values for different battery types.