I’m interested in using VTOL on moving ships and updating the RTL position in real-time while displaying the ship’s icon on the mission planner. To achieve this, I plan to install the Pixhawk Cube as the rover(boat) firmware on the ship and continually update the VTOL’s home position to the rover’s home position with plugin code. and connected rover will display boat’s icon on mission planner.
before I test this configuration and plugin on actual vehicle, I want to do it with SITL instances.
However, I’ve been having trouble setting up a swarm of rovers and planes.
swarm of only plane or copter or rover is okay, but different kind of SITL vehicle is not possible on default configuration. the existing SITL instances will turn off when make new SITL instances.
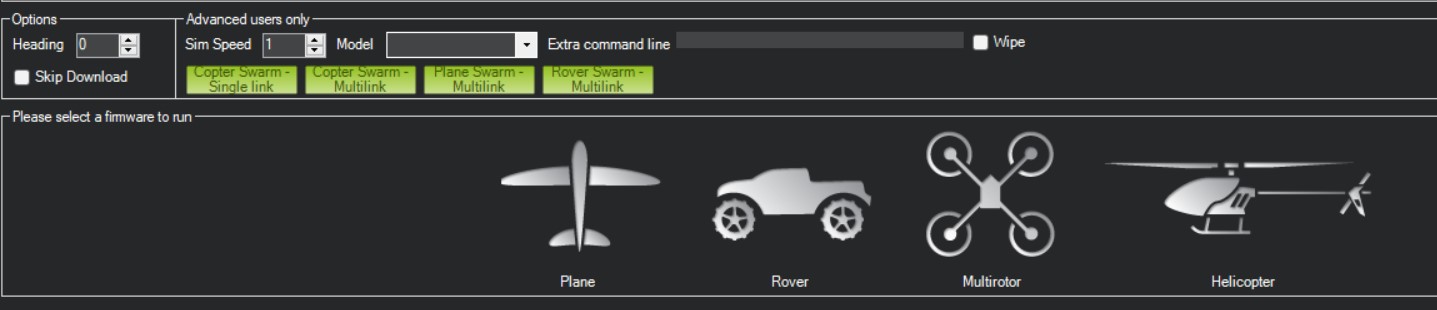
While searching for a solution, I discovered a command line in Mission Planner for running two different types of SITL instances:
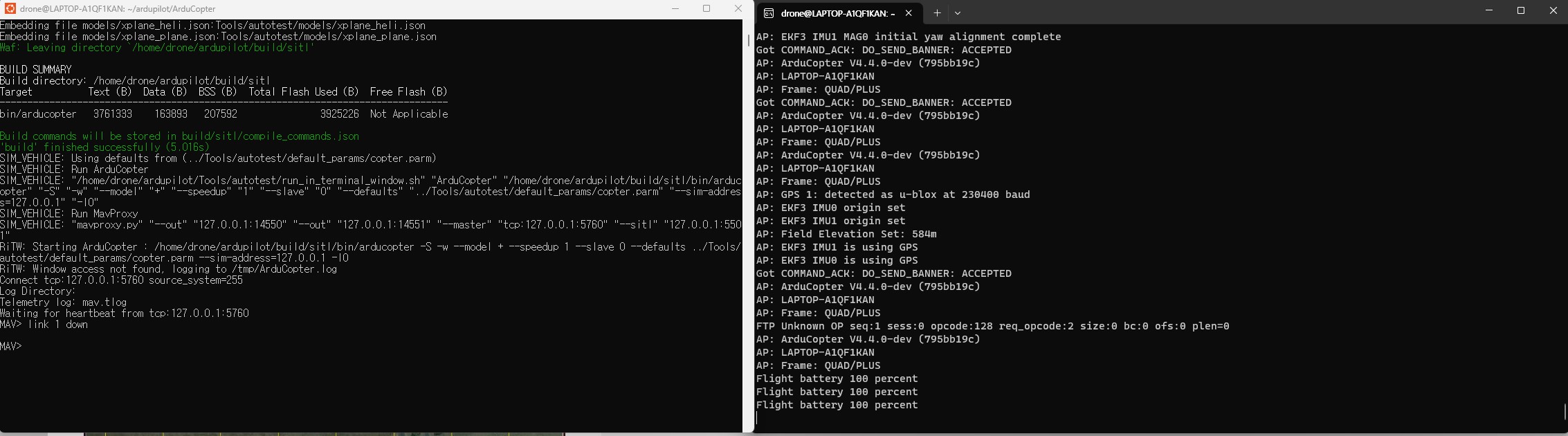
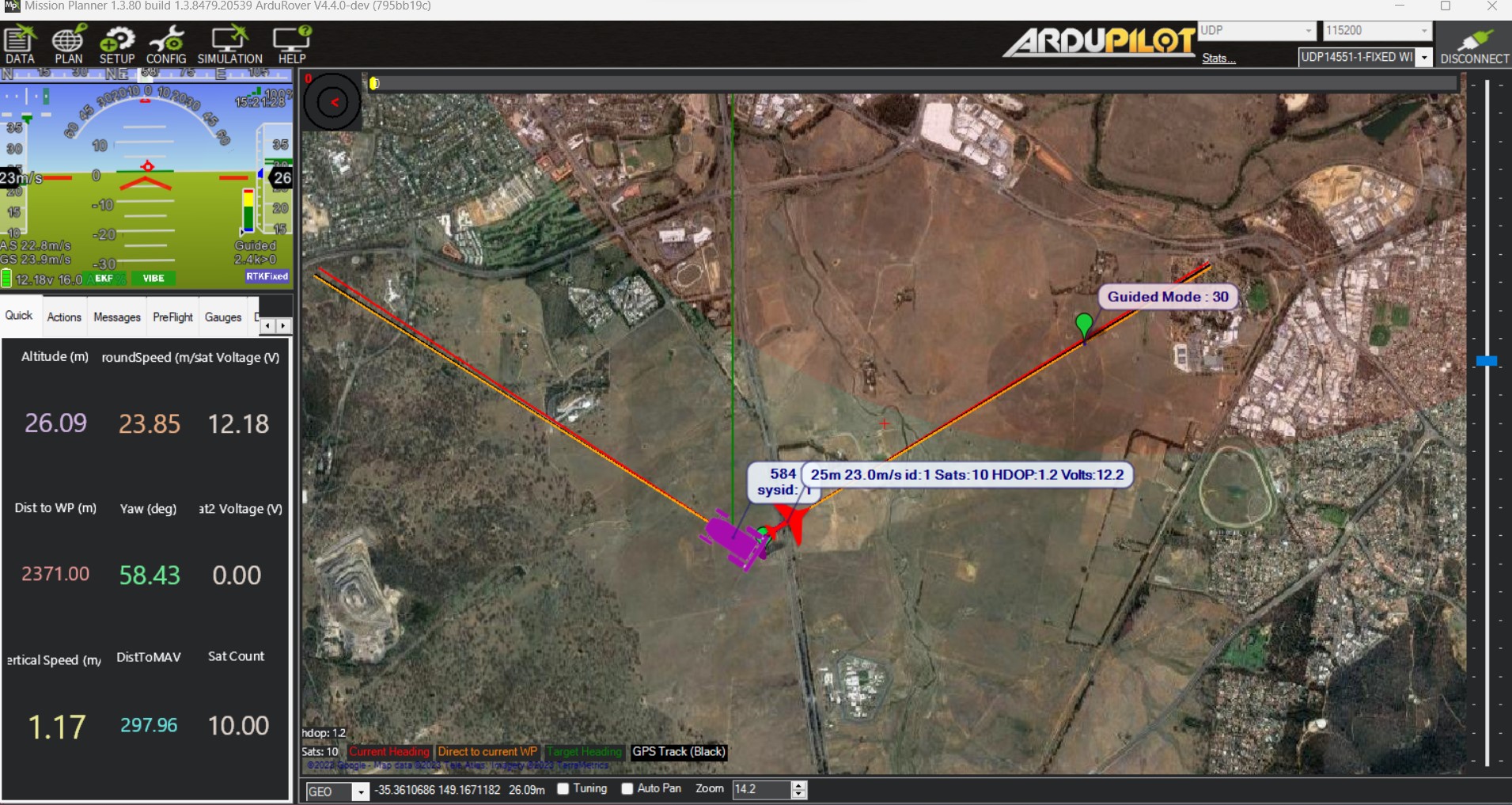
I launched two Ubuntu instances, as shown in the screenshots.
Unfortunately, the result was not good, as I encountered the error message “MAVLINK1 DOWN” like testing SITL on Mission Planner or Cygwin MAVProxy. I believe that turning two instance simultaneously down 1 instance.
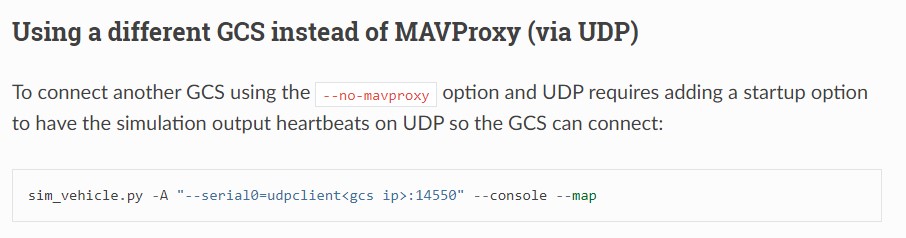
Did you read the documentation link that I included ? You have to use the --no-mavproxy option to start a standalone SITL image. Also in the docs, that you have to add your address and port. Let’s say, you want to start two vehicles. A copter and a plane from WSL.
cd ArduPlane
sim_vehicle.py Arduplane -A “–serial0=udpclient:yourWindowsIP:14550” --no-mavproxy
cd ArduCopter
sim_vehicle.py Arduplane -A “–serial0=udpclient:YourWindowsIP:14551” --no-
mavproxy
Now, I can create a plugin that utilizes ArduPilot for marine purposes and helps the world.
I apologize for the confusion with the documentation. Although I read the documentation you provided, I found it difficult to understand, maybe my fault.
Initially, I thought that just typing same on the doc “sim_vehicle.py -A “–serial0=udpclient:14550” --console --map” would be sufficient. However, I omitted to read the “–no-mavproxy” option. and I didn’t know I should subtract “–console --map” option. I’m sorry for overseeing this simple things.
Moreover, I noticed that there was a mistake in the documentation. Specifically,
the “–serial0=udpclient"gcs ip”:14550" lines on the document omits a colon(“:”). It should be written as “–serial0=udpclient:“gcs ip”:14550”. Otherwise, it will not work on multiple SITL instances.