I got it… but thought I would spell it out… in case others missed it 
I don’t think my points are understood very well. If I had the experience to make the changes, I would have done so already. If I had the money to fund such changes, I also would have done so. I come as a community individual, making NO profit from Mission Planner, and only representing those that I interact with. I feel like I am but a small voice for the community who provides little feedback. Please do not interpret my requests as being ungrateful. I have thanked again and again while being constantly told that I should just be doing it myself. I too volunteer with testing and often sacrificing my equipment for the benefit of the community, and I devote some of my time every week to help new users here on the forums.
Instead of bashing those who agree that there should be changes, volunteering them to make the changes themselves, and assuming that they are ungrateful, I think we all should keep these ideas in mind to make the ArduPilot project the best. Saying “PR’s welcome” is about the equivalent to “we don’t care enough, go do it yourself.”
I’m very excited that Mission Planner can receive some attention, and the whole community will thank all involved, especially Micheal, Hex, and ProfiCNC.
2 Likes
Don’t know why all the developers tends to forget all the crashes people donated to the cause.
As i wrote in another thread it is about time to have some mutual respect, to the developers off course but to the testers that fought the field battle in all these years too…without any funding…
Just an example on how people took risks and helped testing:
And yes i think MP would need a makeover too. I think it should be done by the people that know how to do it and to all the rest, they should test it with thousands of hours of usage at the field as it has been in the past. Unless developers think they can put hundreds of thousands of hours in testing on their own.
This is a constructive critic, but as usual devs will probably jump up and attack me, as it always happens around here.
p.s. Any chance you will hire an UAVCAN dev anytime soon so that we can have the long awaited and pubblicized UAVCAN support for Here2?
Can bus was “on the way” 4 months ago, must have been a very long way…
p.p.s. the 2.6k views should be an hint of the interest people have on the topic
1 Like
I think for me it is a matter of tone. For Mission Planner there is Michael. He wrote Mission Planner the way he wanted to and shared it with the rest of us. There is no they. It was a monumental amount of work to get Mission Planner where it is today. So why would it be a priority for him to give it a “makeover”. How many people are actually unable to use it as is? How many hours of work would it entail to change it? Would it be worth the effort? DIY is shrinking as a percentage of total units. RTF drones sales dropped 50% this year in the US. Since a LOT of people have learned Mission Planner and use it as is why would it be worth sacrificing development time to give it a cosmetic makeover?
For me it is being satisfied with what I have. You posted your concern and got no reply because there has not been enough interest by other users. The devs are all occupied by new projects. Most require projects with a sponsor to keep them paying their bills. You still have a concept that this a company with hundreds of employees.
Making a suggestion about changes to any aspect of Ardupilot is fine but acting upset that no one has jumped on your suggestion or that the devs are purposely ignoring you is wrong.
1 Like
Ahahah, usual “it’s all good, lets all be gratuful for what we have for free” kind of answer.
Nice
What kind of answer to you expect?
The we will jump on your suggestion and get it done for you right away answer?
Everyone has respect for the people who risk their gear testing Ardupilot.
But who do you think the "people that know how to do it " are for Mission Planner. There is one person. He is busy. Who else is going to do it?
I am not saying nothing could be improved. I am just saying there is only so much in the way of resources, money and people.
I have been lobbying for UAVCAN support for years now. But the bottom line? There is nobody to do the work that is not getting paid to do something else.
In a lot of ways it is still market driven. Money talks. If a company comes in and is willing to pay to get their needs addressed then paying the bills comes first or the whole project goes away.
This is not the days of a bunch of rag tag volunteers coding their way to fame and fortune. This requires some of the highest level programmers available on the planet and they need to work full time on it or they would never get anything done part time for fun. So they have to get funded some how.
That is just the way it is.
2 Likes
I am not saying that somebody “has to do it”, just giving my opinion that needs a makeover badly. No resources to do it? Well i understand it but that doesn’t make it good looking or user friendly.
Devs ask us to test new betas and new stuff on a weekly basis, so why shouldn’t i ask them something too?
As already said, a big thanks to the devs, but without hundreds thousands hours of field testing they wouldn’t go anywhere, just like testers wouldn’t go anywhere without devs.
All that being said, it is a public forum, some people think MP is 10 years behind with user interface? They have all rights to say it, criticize and bring out problems is free workmanship too…
When you say the CAN development is high on your “newly” hired developers list does that mean 1 year, 1 month, or 1 week. Kind of crazy that you advertise these things when you release them but then they never get done, or at least we keep getting the message “we’re working on it!!” And when you say you have hired @Michael_Oborne what is his role does this now mean the only person that knows MP is now working on other projects. @anon67614380, I 10000% agree with you about the developers and testers, without this large community to “test” these developments this would be dead in the water. I know a few people that have abandon the pixhawk and proficnc products because it constantly seems as though they were always beta testing something for them with little knowledge or info.
Wow! What’s with the hate?
When we release new products, we announce what is Beta.
We announced that CAN was “To come”
We have delivered on every promise we have made!
You are free to turn up to Ardupilot meetings, get into the community, and to ask questions in a positive manner.
Of, just ask here, or on Facebook in a non attacking manner…
May I ask, which products are supposedly beta? Other than the … beta released products?
2 Likes
Why all the criticism is always hate? Can’t you take it as anybody else to make your products and comunication better and not on a personal “hate” level?
Here nobody hates anybody.
Some people have bought Here 2 believing in the support coming, now 4 months are gone, can you please put the “you bad people hate me poor guy” mode apart and answer to the question about when the support is coming?
About the “positive manner” maybe there is a fact that is not really clear, we bought products from your company, we are not on the same level here, we are customer, you are the company that makes the products. We don’t need to be positive, we just need to be polite, thats all. What you need instead is to be clear to people that gave you money believing in the “support is on the way”.
thanks in advance
1 Like
Yes it was 4 months ago…
We released hardware that the developer team can now make firmware for.
I’m not sure what else you want to hear. If the community feels that CAN is the priority, then it will get done.
One of the biggest sticking points with CAN, was the fact that there isn’t much CAN hardware in the hands of the community, so therefore, motivation to get CAN done was low.
So we have released CAN hardware with a fully functioning CAN boot loader.
It’s 100% ready for can firmware.
And the OMD team are working on that.
And now we have hired 2 full time!
So please, help the community.
1 Like
So in the release note i posted up in this thread the phrase “UAVCAN is on its way” what you meant was “it’ll come when the community will develop firmware for it?”
If so, maybe it should have been a bit clearer to customers. The way it was put i read it like your company was developing UAVCAN support for it to be used with AC 3.6 (wich already supports UAVCAN).
So just to make things clearer, who are the people supposed to develop the support for UAVCAN for Here2?
This is a quote from your press release:
“Out of the box, HERE2 supports standard serial port + I2C transmission data, just plug it in as you did with the previous generation. With support for CAN bus on the way, the HERE2 can be switched through the built-in mechanical switch and the included CAN cable.”
Now if the truth is that UAVCAN will arrive when the community will pick up interest in it than the press release sounds a bit misleading, no?
This doesn’t need to go any further off topic here and we do not need to be picking sides or even discussing if we are for or against making changes to Mission Planner. It APPEARS that Hex/ProfiCNC have agreed that further improvement of mission planner is important.
If this thread and it’s derivatives are seen as significant criticism, then WOW there are a lot of critics. The original Facebook poll and ardupilot survey do not lie. Requesting changes and providing valuable feedback and suggestions is NOT criticism. I would think criticism is more along the lines of saying the program and its developers are total garbage and everyone should steer clear of the program and focus elsewhere.
I know how most of the community feels about Mission Planner, and I hope that hiring the 1 maintainer of Mission Planner achieves the goal of improving it. I fear that the Ardupilot team has little control over this critical software, and now that “money talks” we have to trust that Michael’s employer will cater his work to their customers requests.
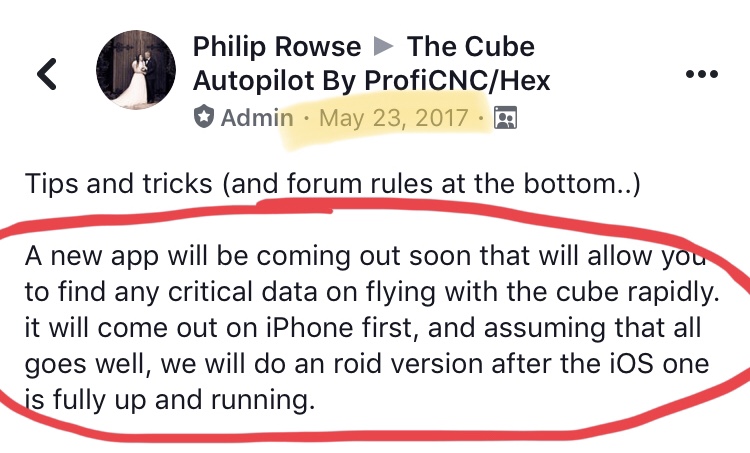
I have seen plenty of marketing and promises here without follow-through in the past, and I’ve learned not to trust everything that I hear. Hopefully this works. I also hope the app comes soon (2 years soon).
I not sure if this is good news or bad news. How will this effect Open Source if MP is under the control of a Chinese manufacture that would naturally control the software to best suit it’s agenda or will HEx follow the open source bylaws. Sound like this could be a DJI knows best scenario.
1 Like
Firstly, the FAQ about this forum states:
This is a Civilized Place for Public Discussion
Please treat this discussion forum with the same respect you would a public park. [emphasis mine]
[…] keep this a clean, well-lighted place for civilized public discourse.
This is put right at the start of the FAQs, and for good reason, I believe. So I encourage to keep this civil and respectful, in word and in attitude.
(If there are concerns with hardware sold, they should probably first be addressed to the vendor, who in turn will (hopefully) solve them with their supplier.
Generally being an “early adopter”, I have also on occasion found (in any space of tech), that when hardware is released, firmware and OS support is not always up to speed on initial releases.
I agree that it would be desirable if the adverts/ announcements of anything released to any market fully matches the expectations of paying users. Yet I also have come to learn over time with a wide variety of products, that to smoothly coordinate the entire process of development, production and distribution/ delivery, along with support and good documentation is not a trivial thing to achieve. In this some grace and patience is helpful - and from the supplier side a realistic time line and rather under-promising needed. But let’s keep this thread on track.)
As far as Mission Planner is concerned, it seems like it has a really wide-spread use - whenever there is a video or other images, whether in a hobbyist context, in research or in a commercial setting, very often MP can be seen. And it can do a lot! There are even many features that allow to do helpful things that are hardly/ not yet documented or polished.
Yet I would also agree, that the usability could definitely be improved/ streamlined in various areas, as well as helpful features be added.
For that, I think it is helpful to think beyond purely a software and instead come from a perspective of an overall workflow, and view this more as a tool to accomplish a task.
In that, MP is a pivotal piece for many users, but one that should enhance the overall process; it is unlikely an end on its own (for most users).
I believe today already Mission Planner is used in various settings to accomplish a variety of tasks. Ones that gather data by the use of a UAV, bring value and ultimately aid in decision making.
With all it’s capabilities, MP is well set to continue to be this very crucial component. Yet there is room to grow to bring it to full potential.
Therefore, I think it would be wise, when discussing a “Makeover” rather than already concretely looking at which features should be changed/ added/ improved/ adapted, to first take a step back. And instead to take a well-moderated, good and deeper look at where this GCS, at a higher level, could and should lead to, taking into account user needs and use-scenarios.
And to then lay out a road-map, so users know where this is all headed, as well as communicate the progress.
After this has been gathered and is clear, concrete input on how to achieve this in a user-friendly way may make more sense.
But before that it would be very helpful to leave the silo and look how this all fits into the developing UAV world at large, taking trends and the needs of emerging verticals into account. I would not be surprised if a more modular approach for the GCS would be one outcome, to satisfy user needs.
Lastly: I realize that what I am about to say may be a somewhat touchy subject in an Open Source community. I do see the work and experience that somebody has put into a project as valuable! And if this software/ service/ support helps me to do my tasks faster, safer, more efficient, I don’t have a problem paying something adequate for it either.
(I can gladly (continue to) contribute with donations, suggestions for helpful or desirable features, or point out bugs or other shortcomings and improvements - yet I simply don’t have the knowledge, skills or time to contribute with code/ PRs… and I think I am not alone.)
While software programming is certainly a creative challenge and can be enriching for the sake of just that and it can simply be fun to develop something that “works”, I want to suggest to look also beyond enthusiasts and take into view those members in the community that want to/ need to/ do employ the tools offered here in a commercial context. If they gain value, they may be open to buy a license for a premium version with special features and prime support, thereby contributing funds for more effort to go towards more development and continued growth. (Not every company (MP-user) is large enough to sponsor a larger feature development.)
I don’t have an answer or an exact model as to how to practically and fairly do this, but consider this quote:
No large open source company has successfully survived solely on donations. Nonetheless, these other four business models—and the successful companies that have adopted them—are the proof that open source software can be at the heart of a sustainable and profitable business https://opensource.com/article/17/12/open-source-business-models
@Naterater, can you please provide us with where you found that information? I have looked on this forum high and low to no avail!
I sure hope this new app and the work that @proficnc is paying Michael to do is going to also follow the open source way. If I were a business and “hired” developers to make a new software that they the company “paid” people to build I can see them making it closed source or at least a paid for product just like UGCS and the others, they need to make their money back some way or another.
@proficnc
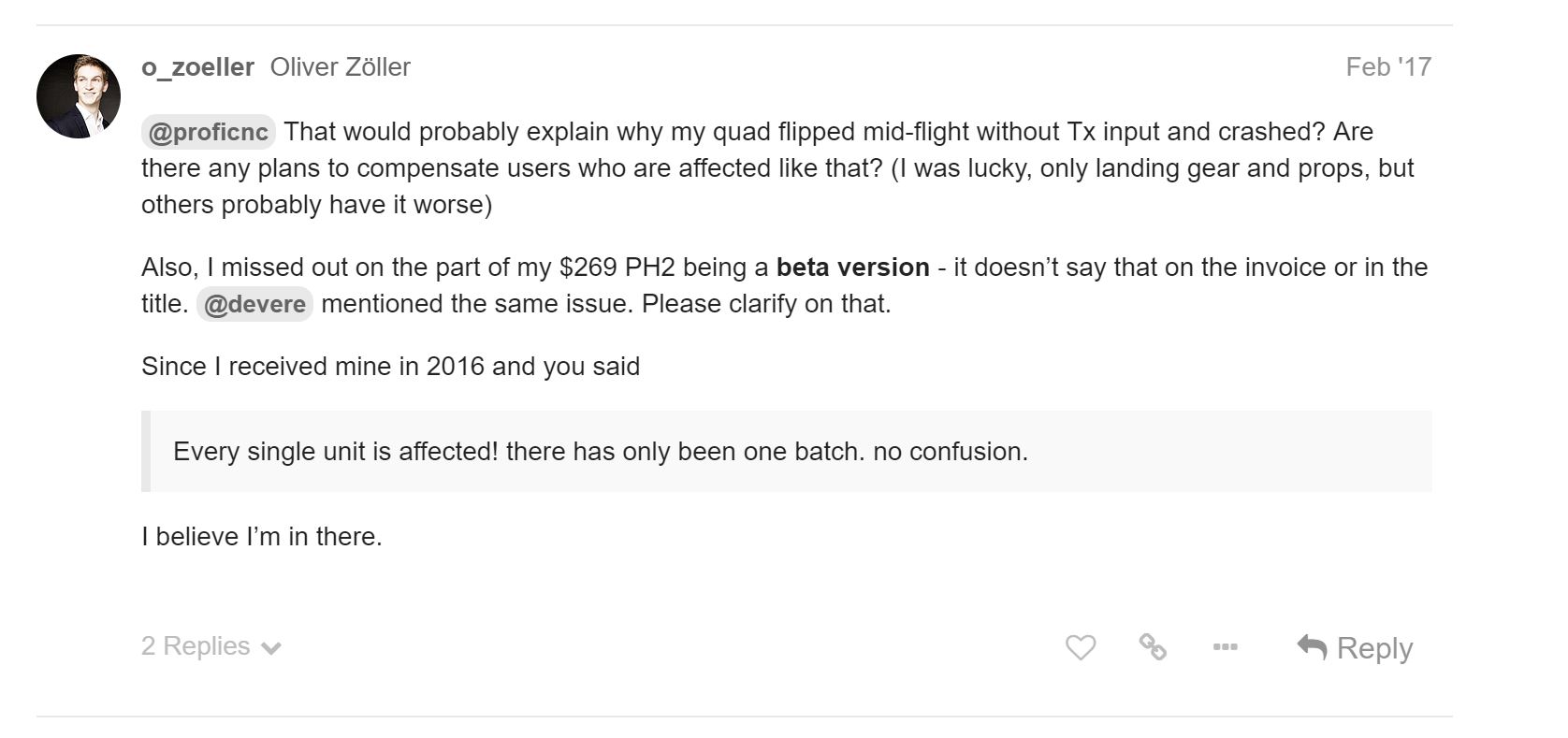
I may be wrong but we purchased a cpl of your original pixhawk cubes and I never on any website or even my invoice saw a place where it said this is beta, I did however see some places metion an alpha releases.
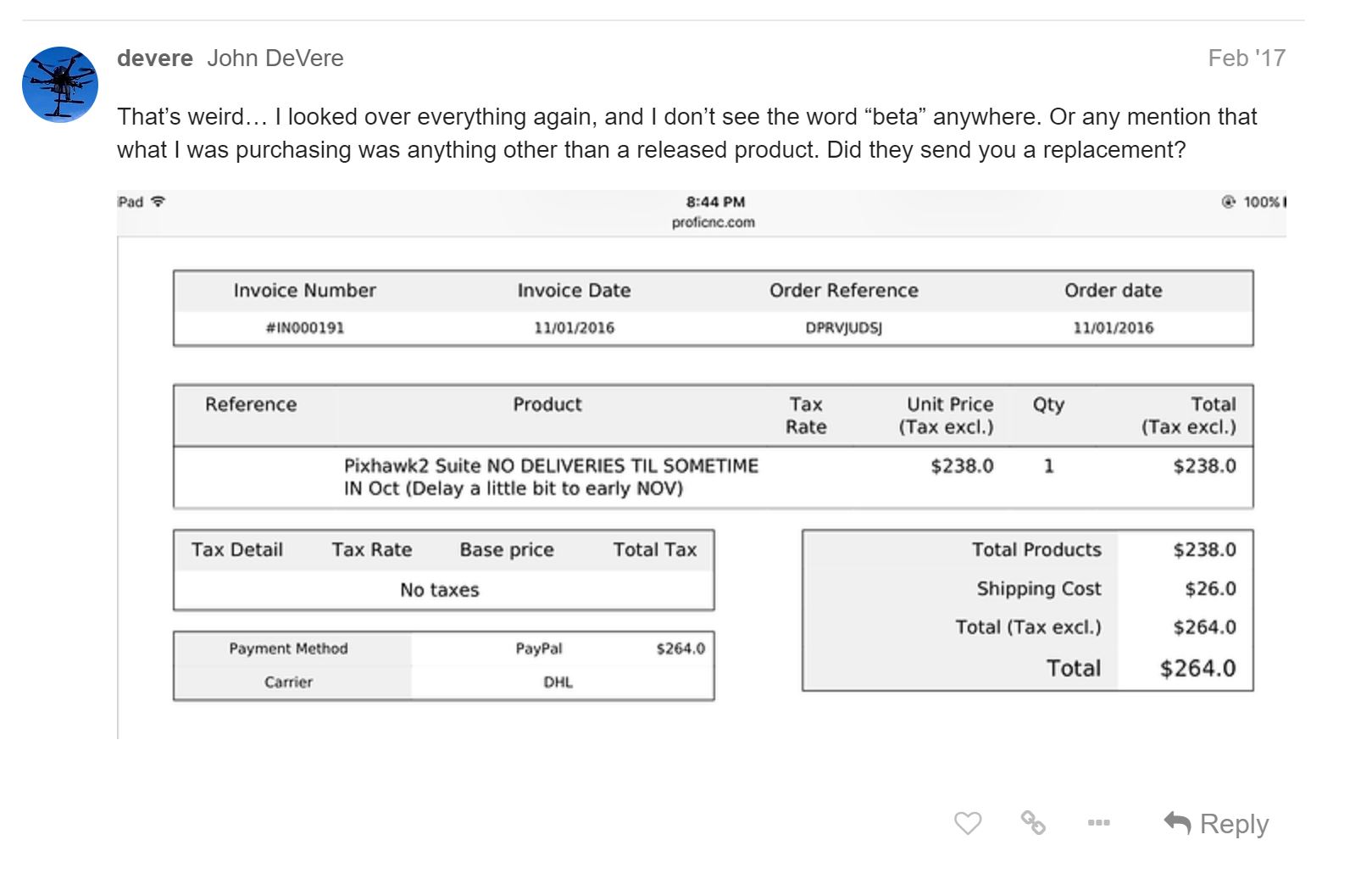
This by no means is “hate” as you state and this is by no mean nasty as @camti made sure we knew about rules. No names have been called and although you can take typed words as whatever attitude you’d like! This is simple constructive criticism (albeit a bit straightforward and no sugar coating.) If I would have taken all the times I was criticized as “hate” then boy I wouldn’t have gotten very far. You are in a business and being in a business opens you up to constructive criticism (and nonconstructive criticism, its how folks respond to that, that makes the difference) and also customers that are not happy with products simple as that. I think one thing that may have put folks off is that you stated its the communities responsibility to come up with docs on products you make. I would say yes and no. In my opinion (again everyone is entailed to one) it is not wholly the responsibility for the community to come up with docs about specifics on your products, but I would say it would be part of the communities responsibility to come up with use case scenarios that were not clearly defined in your docs or specifications. Could I seek clarification on who is proficnc and who is hex are they the same entity or separate? You know how many people have asked simple questions about the new mini carrier board such as pinouts, how to change voltage from 5 to 3.3, how to switch from PWM or specktrum, or what simple pins are simply because of the lack of documents that the original seller provided, this to me does not seem like a community responsibility at all as we did not design it or engineered it.serial 4/5 on mini, ppm vs spek, 3.3v vs. 5v just a few example of simple questions I believe the folks that make it should answer.
Sorry @Naterater for making this so off topic but this also has relevance with your issues with MP.
Those posts were on Facebook in various groups. I think “The Cube Autopilot by ProfiCNC/Hex”
The original poll was from the ardupilot.org group.
if you do not know that ProfiCNC is Philip Rowse, then I do not know where you have been.
I Also do not know how you even found out about the first batch of the cube black, if you were not on one of the forums where we announced it. the first batch was ALWAYS announced as a BETA.
As far as being in business… I have been doing contract designing for many companies to supplement my income. 90% of what I have don here has NOT been paid… Thankfully, Hex has been kind enough to support me and go out on a limb and make all of these products. they have up till very recently been running at a loss on all of this.
Now that we are finally seeing a return, they are paying me half a weeks wages, and we have now just hired 3 more full time developers…
So If you wish to attack us for keeping this all going with no external support… great… keep it up.
But I’m off to celebrate Christmas, and will be offline toll the 6th of January. feel free to take this time and think about how you would like to use my time, and yours…
I.E. if you are finding that there is information lacking in the wiki… feel free to ask me for the information… and then feel free to put it in the wiki!
I have provided pin-outs and pictures of the mini carrier for those that asked… any of you could have put it in the wiki.
1 Like
Still taking it personally and still using the poor guy attitude, no answer yet on the precise questions about press release uavcan support “on the way” statement.
No one is attacking here, lets put it this way, i bought an Here 2 believing your statement about “support is on the way”, after 4 months still no support, when is it coming?
All the stuff about producing at a loss and all the rest is a free choice, it can’t be turn on to customers.
2 Likes
In my mind there is a difference in making suggestions, requesting changes or features and harping on it. It is totally appropriate to request changes, to want fixes. But this community is not a big corporation like DJI. I am sure Philip worked hard just to find a company that would manufacture his cube designs without a guarantee of large volume. If you don’t get that DIY is all about experimenting, using the ideas that others have shared. There are seldom guarantees. The innovators are small groups of a couple of people working to bring an idea to fruition and they often have to do the engineering and fill the orders. There are often production problems that must be overcome. I am not saying that perceived poor customer service is good or OK. But i think the reality is that these people are doing the best they can and have ups and downs.
A lot of you don’t seem to realize that good documentation is the most expensive part of the development. A one man show developer can choose to write great documentation or work on the debugging the design. Good documentation writers are hard to find.
I think it may just seem a little ungrateful to a developer when they are working their butts off to try and achieve something with very little resources and someone creates a thread that seems like it is saying “you are ignoring my requests and I think these points are more important than anything else you are doing at the moment so why are you not responding?”
I think you need to come into this community giving the players a little slack. These are passionate people really doing the best they can. Are they gong to make mistakes? Sure. Are they going to fall behind and not get something out when they thought they could? Yes. Are they going to have to take a paying contract to do something else for a few weeks to get the bills paid? Probably.
It is just the way it is on the bleeding edge of new ideas. Not saying it is good just saying it is that way.
2 Likes