I calibrated my quadcopter in outdoor environment (pixhawk, neo 8n gps) but for some reason I see my copter changing its position when its staying idle in DISARM mode. It’s just sitting there but I think the GPS is glitching.
I used a different GPS and calibrated it again but still its glitching on its own. I didn’t take a test flight to avoid any crashes. Any idea what’s going on?
I did a test flight today. The copter took a stable takeoff but during hover it was circling around. Not aggressively but slowly. I have attached my telemetry logs. I am getting an error when I try to download DataFlash logs:
Getting list of log files...
Error:System.TimeoutException: Timeout on read - GetLogEntry
at MissionPlanner.MAVLinkInterface.GetLogEntry(UInt16 startno, UInt16 endno)
at MissionPlanner.MAVLinkInterface.GetLogList()
at MissionPlanner.Log.LogDownloadMavLink.<LoadLogList>b__12_0()
unfortunately telemetry logs will not help too much please check these item for log downloading problem
1-update your mission planner to latest version
2-check sdcard on your pixhawk
3-check log bitmask of your fc
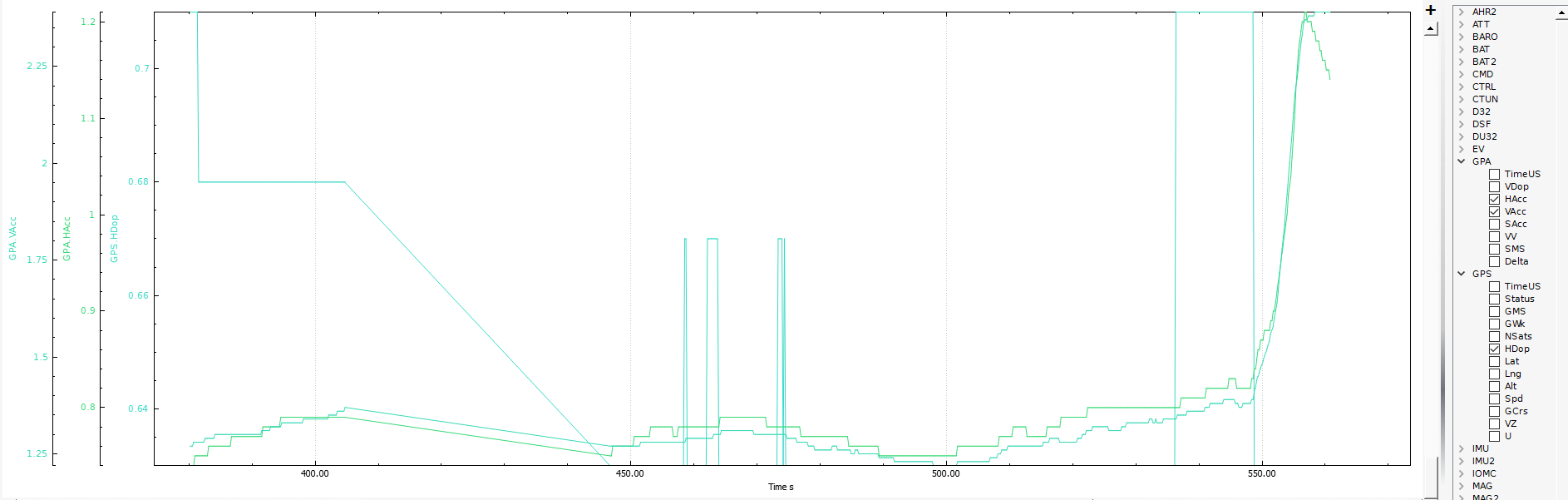
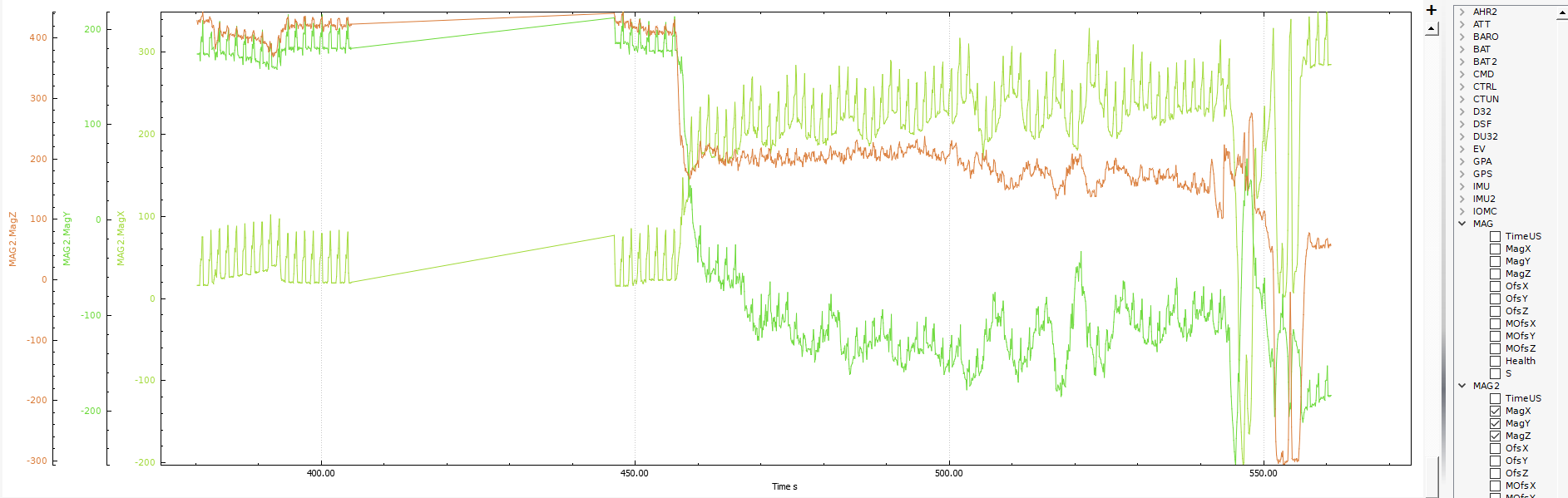
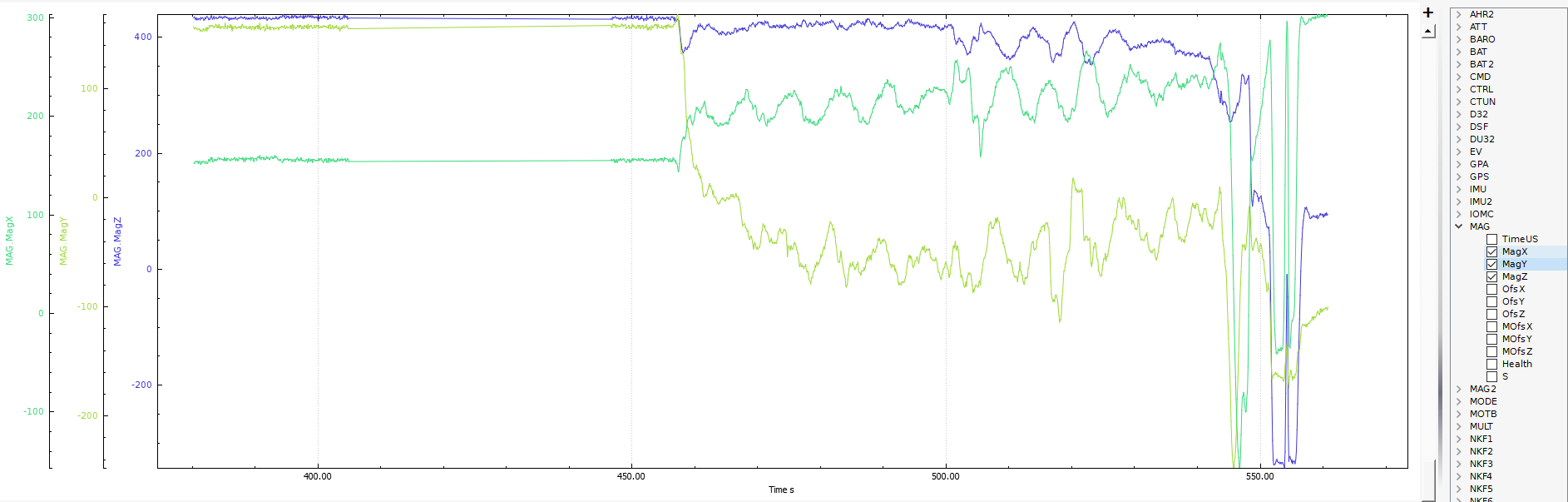
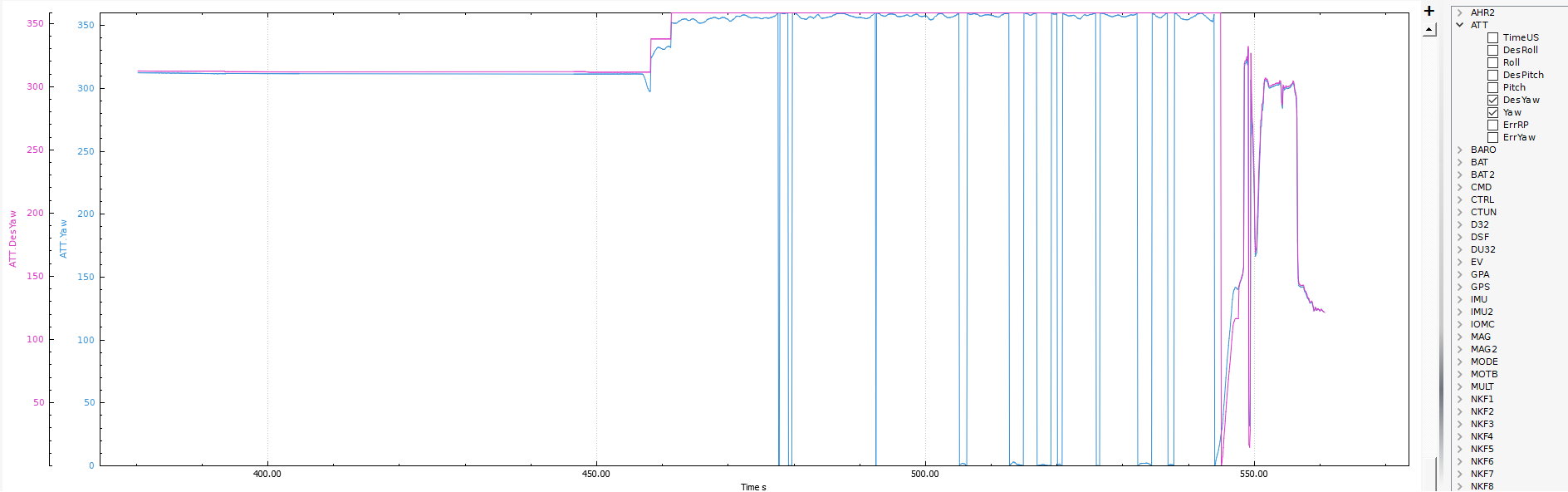
by looking at ATT values in log your yaw and DesYaw is different sometimes i think its because of noise on mag2 (try to keep away high ampere wires from your mags totally)
Then there is another problem. In the graph of yaw Hosien posted above it seems to show a very rapid Yaw spin but I don’t believe the craft can spin this fast and you are reporting it’s not spinning at all. In one case it shows a full spin in 200msec which isn’t possible.
The motor outputs don’t indicate rapid yaw occurring either.
Okay. I unchecked Compass #2 and ran a test flight again. This time the flight was pretty stable
Though the throttle stick takes a lot of delay when changing altitude. But the roll, pitch and yaw work great. I have uploaded my logs again. Do you see any anomaly now?
P.S. Thanks a lot sir! Logs can really help when diagnosing flight problems.