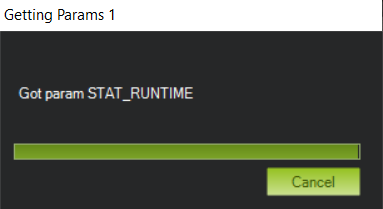
When connecting the drone to MP the parameter loading process gets stuck at the end with the parameter “STAT_RUNTIME”. This occurs with both the direct USB connection and the wireless telemetry connection. And, with both MP (1.3.70) and QGC (3.5.6).
I have tested this problem with two different quadcopters, one fitted with a Pixhawk1 and running AC 3.6.6 Nuttx and the other fitted with CubeBlack running AC 3.6.12 ChibiOs. The problem behaves in the same way in both cases.
I have noticed that if I flash any new firmware in the autopilot the problem disappears, but when loading a parameter list from a file the issue returns.
I finally realized why this error occurs. I started comparing the default parameters with the parameters in my different parameter files one by one until I found the parameter causing the problem.
In my builds I set an auxiliary switch to “parachute enable” and another to “parachute release” (ch7 and ch8), this way I improve safety and avoid false parachute releases that I have experienced in the past. #49254
The problem arises from having the “parachute enable” function assigned to any auxiliary channel. Connecting the drone to any GS (MP or QGC) with the auxiliary switch in its down position (parachute disable position) the issue occurs, and the GS get stuck loading the parameters. But if the drone is connected to the GS with the auxiliary switch in his upper position (parachute enabled position) the loading of the parameters is correct.
In my opinion what I think is happening is that the GS wants to load the parameters of the parachute but when the auxiliary switch is in its lower position, therefore the parachute is disabled, the parameter does not show up and the loading process gets stuck.
Was this problem known to exist? Is it considered a bug? Can it be fixed somehow?