I have developped a propietary Groundstation software and I am trying to use Mission Planner for WP editing and uploading of the way points to my Groundstation and also displaying airplane position in Mission Planner.
I started with Heartbeat and GPS Raw sentences; I was sending them to Mission Planner using MAVLink v.1 sentences. Mission Planner recognized them, displays correctly aiplane position, etc. so far so good.
Next step: I tried to upload from Mission Planner WP to my groundstation. (By pressing Upload WP button).
When I do this,
Mission Planner sends MISSION_COUNT
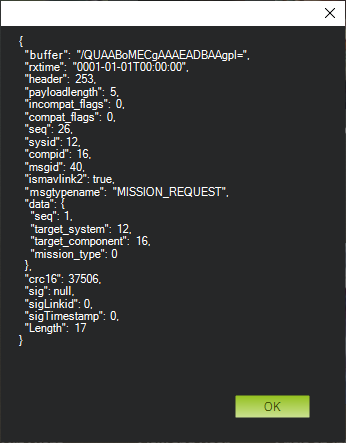
My Groundstation responds with MISSION_REQUEST,
but Mission Planner seems not to recognize this sentence, sends MISSION_COUNT a couple more times, and then displays an Error Message, something like timeout for WP, within a function which seems to include Mission_Type. Mavlink v1 does not have this parameter for MISSION_REQUEST. So I think that the problem is that I am using v1 and not v2.
I changed the sentences to v2. Again Mission Planner recognizes perfectly my heartbeat and GPS raw, but with MISSION_COUNT things start to look weird: for v2, Mission Count has a new variable added, Mission_Type, and the sentence length for MISSION_COUNT increased from 4 to 5 bytes. however, Mission Planner sends me an FD (=V2) and then LEN=4 (=message length for V1!!!).
And when I try to return MISSION_REQUEST in V2 format (where Mission_Type is also added), it still does not recognize it…
HOW CAN I UPLOAD WPs to my system??? That is the only functionality I want from Mission Planner (in addition to displaying position).
What is the protocol?
The link is through cable Ethernet TCP, so it is 100 % solid.
I can upload the software code if needed