i am makeing a small four-axis multi-rotor.The wheelbase is 120mm.i can fly it in stabalze and althod mode.but when change mode to flowhold mode.it flys not well.
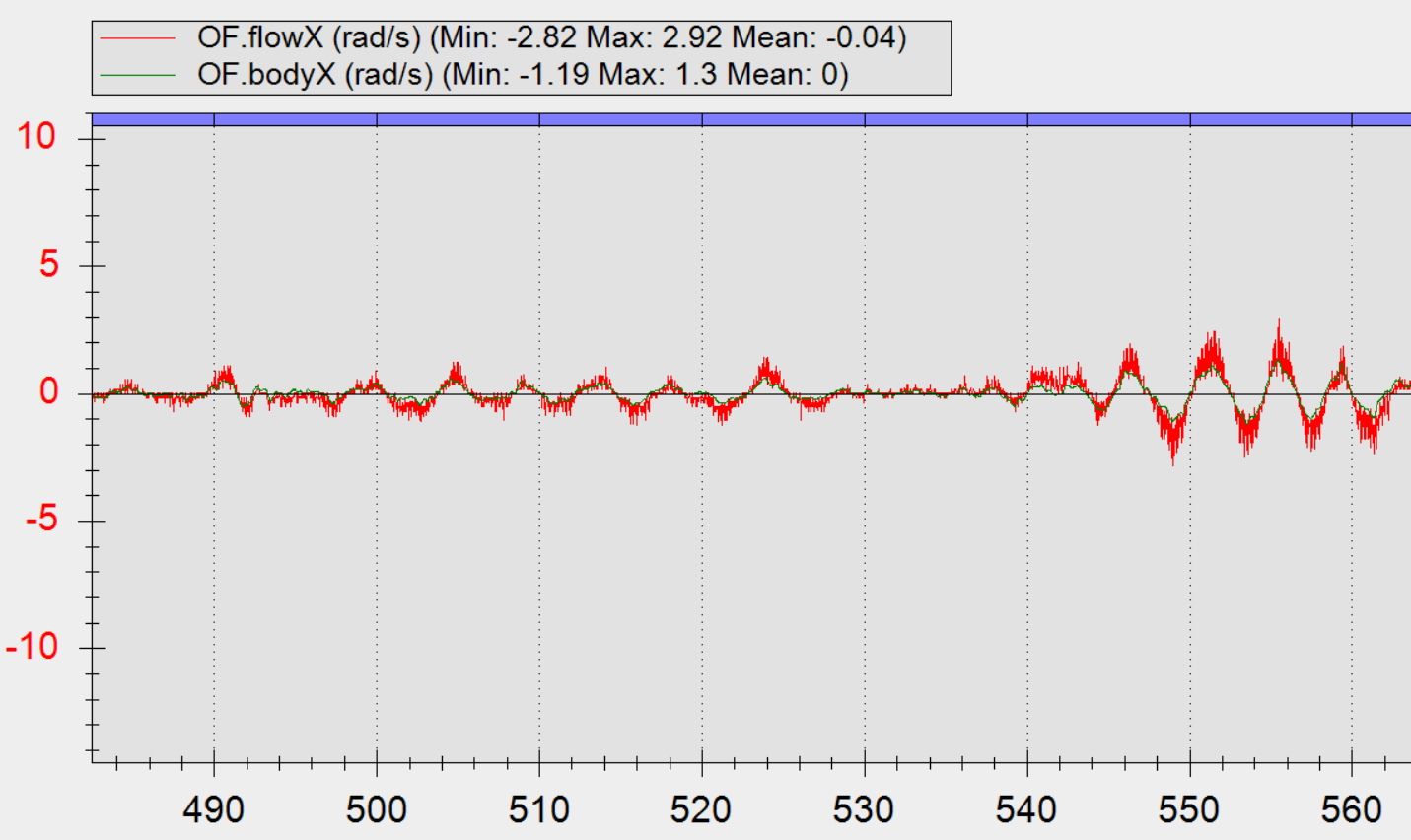
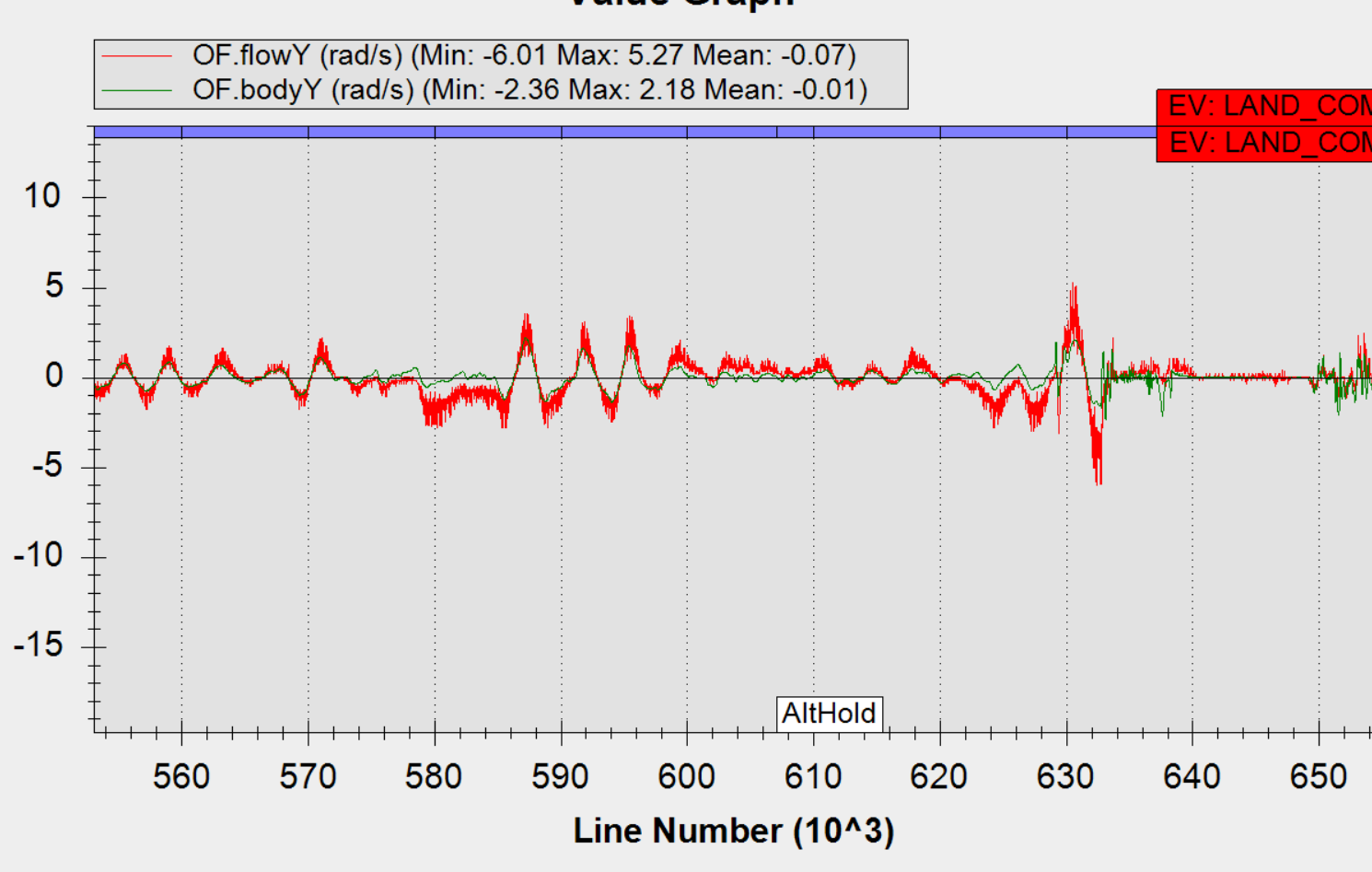
From the following two pictures, CXOF tracking seems to be OK.The flight will keep adjusting the position left and right.
Can someone help me analyze the reason?i have upload my log,please download it.
https://drive.google.com/file/d/1qAULrWYOxzdldoLH6R9HRTUi5gHkM06Y/view?usp=sharing