Hello,
Two days ago I had a crash with VTOL fixed wing.
Preliminary Information: It is a VTOL fixed wing type UAV. The vehicle has a Pixhawk orange cube autopilot. (Plane 4.1.3) I’m using a FUTABA T10J remote controller. The receiver was Futuba. RC and receiver communicate via SBUS.
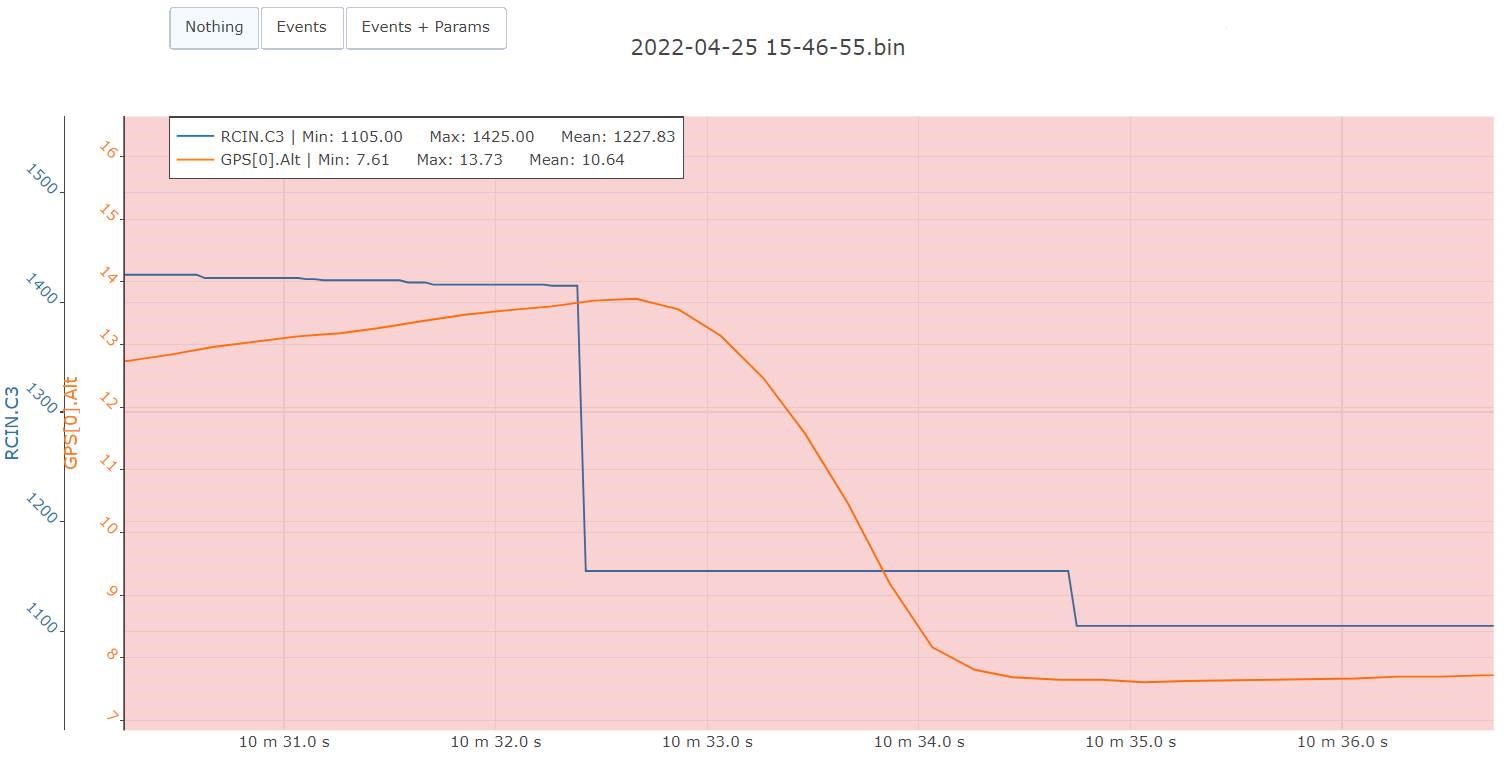
Event: I took off vertically with the RC. I was using it in Qstabilize mode. The vehicle was at 12m altitude and hovered with the quadcopter motors. Suddenly the vehicle quickly reduced the altitude. By the way, I increased the throttle to 100%. I’m an experienced user, I’d like to add that too. It crashed to the ground.
Then I looked to the LOG. Somehow the throttle dropped to 1155us.(RCIN Channel3) I never gave such a command from the RC.
I hope someone can help me understand why.
LOG file: https://drive.google.com/file/d/1UBBzJ3mz9jkSofFSUzPsDAwFSYB5mvO3/view?usp=sharing