Already look at the BRD_PWM_COUNT parameters etc but at that moment it wouldn’t work. Will do further research. We are still learning and in the future, we probably have to add more custom parts to the code and compile it our self. An extra measurement module will poke into the ground and measure PH values. Coming Wednesday day we are going to do a test so would be really nice if we at first could upload your binary file (Y) and do some driving/control/planning tests. And in the upcoming months expand our knowledge of ardupilot and customize it to our needs!
Here is the binary from current master branch compiled for the Pixhawk 4 with the above changes: https://drive.google.com/file/d/1LaSBeN6cGywFXRKV6uM21WDZR8fKaZST/view?usp=sharing
I too built a two wheeled rover a few years back that collected various data from open areas of pasture (in fact, it was using the same BTS7960 boards). I definitely customised many aspects of the code to achieve what I wanted. You would do well to become familiar with compiling and deploying the code. Keep us posted with your progress. Good will to all
Thank you so much for the binary! Will test in in a week or so. Couldn’t test on Wednesday because of a Covid case… Will update you soon… Stay safe and healthy and a happy new year!
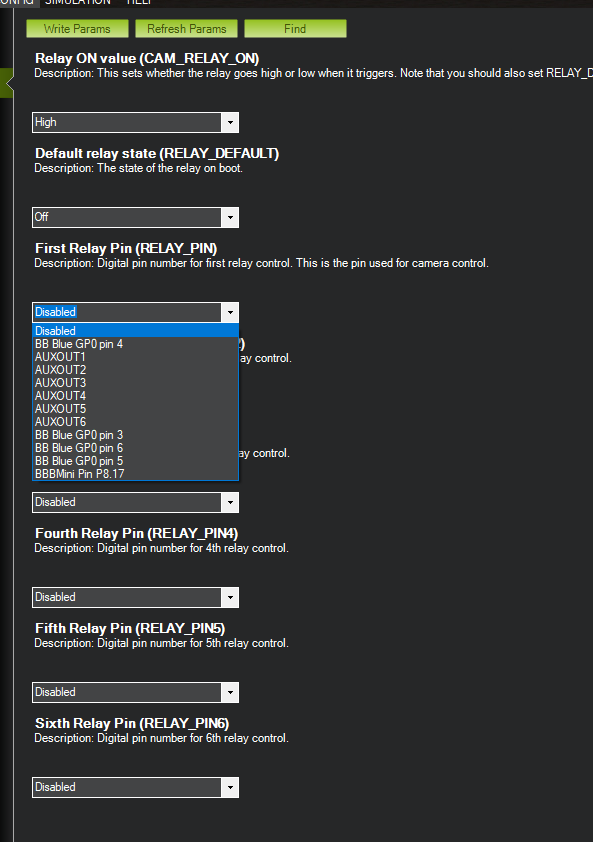
Hey, a little bit later than expected, we uploaded your firmware! It’s possible to arm the rover and we connected a wireless controller. We are using the Holybro PM07 board and got it previously kind of working with the standard firmware and an ESC. With the modified firmware, we are not able to get pwm output on the M1, M2… M8 pins on the board, to drive the BTS7960. Which parameter should we change, RELAY_PINx? to Aux?
Tried a lot of different things, using the wireless controller and setting the throttle left or right setting to RCIN1 in servo output works with an ESC (just to check) after changing #1 and #3 in servo control to throttle R/L no output in the servo controller? We did changed the motor type in the basic tuning tab to Brushed with relay. Also tried to map relay pins to an aux port but also didnt work. we lost track a bit this day maybe somebody could clarify some things
To clarify, if eventually the relay pins are working and they drive the PWM forward and PWM backwards of one BTS7960 is this based on PWM(duty cycle) or is it on/off (just like a relay? )
Learned a lot for sure today
Again thank you for the binary and your effort, we appreciate it!
Small update: the project was on hold for a few months. The main problem was that we used a Playstation controller and needed to use the “RCPassThru” parameter in “Servo1_Function” and “Servo3_Function” to send the RCn _IN signal to the servos
The rover is driving automatic now, going to expand in the future with measuring equipment.
I’m sorry, but it is still not clear to me. For the RPWM and LPWM pins, where are those two connected to the Pixhawk? I also use BTS7960 that has dual PWM pins. Does it mean that BTS7960 need 4 pins PWM in Pixhawk? Looking for your response really soon. Thank you.