Hello,
I’d like to create something similar to this rover, a perfect test hardware to try new software functions and sensors with enough room for various payloads. I hope it can be useful for anyone looking for a diy mid-sized rover at a reasonable price (whereas commercial solutions this size are usually sold for over $1k).
Another source of inspiration is the robot on this video (building process part1 and part2).
This robot uses a welded steel frame measuring 34x81cm with ø40cm wheels and 2x 500W motors. It is quite heavy and needs to be loaded on a truck.
My own version would use the same geometry, similar structure but much lighter, with an aluminium frame, easily transportable by a person.
I’m using 120W 12V DC motors and ø25cm loading cart wheels; running numbers the frame dimension should be 21x50cm. Wheels are paired via a chain and then to the motor, one motor per side (a 4WD setup with two motors), with skid steering.
Do you think it can work? Any suggestions?
Thank you
Just some suggestions and questions you should ask yourself:
Assuming you want an outdoor, all terrain, all weather light weight, low cost vehicle then:
have a look at 1/10 to 1/8 scale rock crawlers. Spare parts and used vehicles are readily available.
If you are operating on hard surfaces, then 4WD and tank steering will wear the tires rapidly. Consider using just front wheel drive.
If you need endurance, consider brushless motors.
For every Kg of weight you add, you will add about another 1.6 Kg of structure to support the added weight. The inverse is also true. The lighter the better.
Almost any chassis will weigh more than your electronics depending on the battery you choose.
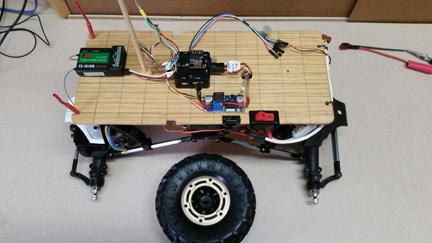
Here are some photos of my rovers:
Above is a 1/8 scale rover and the wheel base or distance between axles is about 500mm or 20 inches. I have removed the body and installed a plywood platform to hold the electronics. It has four wheel drive and four wheel steering.
This is a 1/10 scale rover similar to the above and it is known as a “rock crawler”. The wheel is soft and pliable, is 130mm in diameter and weighs 216 grams. The reason that I chose a rock crawler is that they travel slower than racers.
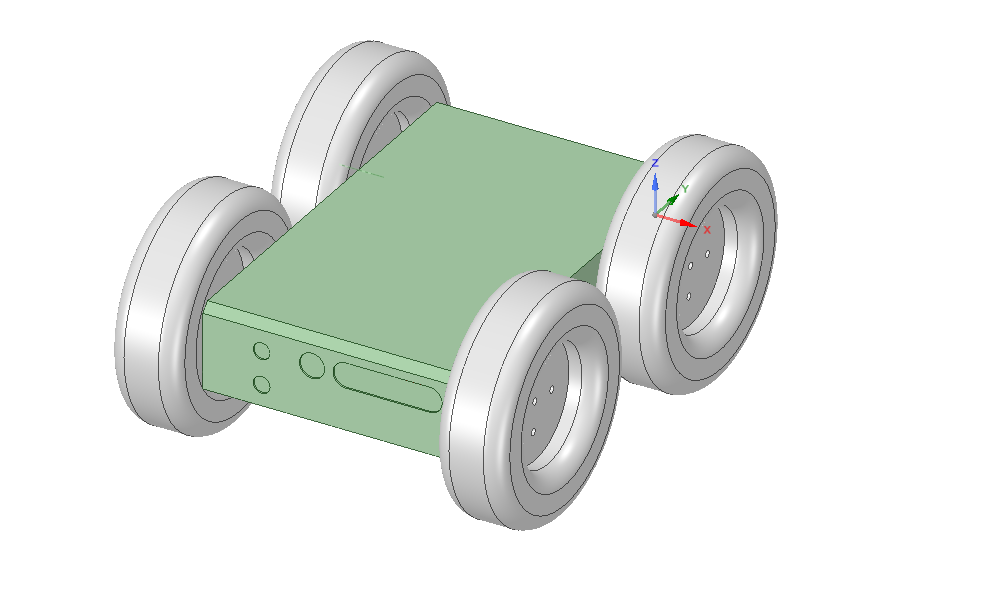
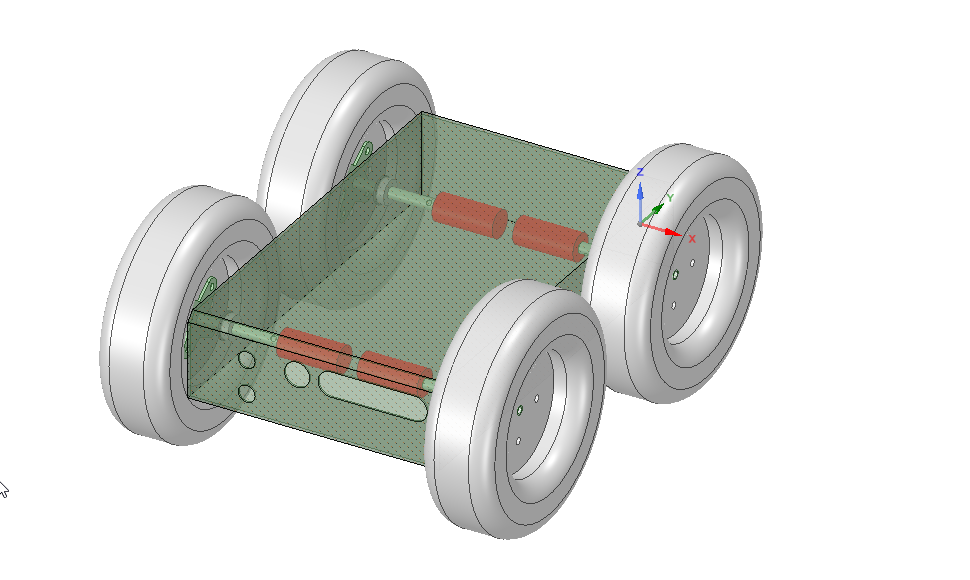
I have picked the parts I think I would use, but not added them to the drawing until I have them in my hands. But thats a next year thing.
It would likely be direct drive skid steer
If the intent is to evolve algorithms, I think you can get by if you convert a cheap RC toy to an autonomous rover.
In my case, I converted some old Bat vehicle to an autonomous 4WD rover which integrates a Taranis RC receiver, Arduino Uno, Pixhawk and some sensors for obstacle avoidance. Arduino is principally for integrating off the shelf sensors and evolving more sophisticated obstacle avoidance schemes than the Pixhawk Rover code allows. Pixhawk is for following a mission and is parented by Arduino. If there is an obstacle Arduino drives the vehicle until path is clear and leaves the control back to Pixhawk…The vehicle can be controlled manually with RC transmitter too.
Now my plan is to scale things up and start spending some $$$.
Here is a valuable link to help you size/validate your motors, wheels according to payload capacity, speed and inclination:
What is the next rover going to be? Adding suspensions?
Obstacle avoidance algorithms tend to work better when sensors/cameras are mounted on a stabile surface.
I do not foresee necessity for suspensions in my intended application. However I would be interested to learn to what extent accelerometers, ultrasonic sensors and cameras would be affected by vibrations.





{kind=link}