Cool! Will try that tonight. Thanks! I’m with you on “someone” enabling ESC telemetry. Are you using a telemetry radio? I use ESP8266 radios on other craft and like it and that’s the plan here.
TBS Crossfire is my telemetry and RC radio.
It’s the tiny receiver above the orange camera in my photo in the first post. It’s wrapped in electrical tape, held on w/ double sided tape.
I’ve been out a couple kilometers which is really more than I’m comfortable with, with this tiny copter. So, good enough for me.
I dug in pretty deep on the ESC telemetry port… Looked up all the pin assignments in apm, and betaflight, and on the stm32f4 datasheet. I don’t think it’s conflicting w/ anything… My guess is the person who made the original hwdef didn’t have an esc w/ telemetry, so didn’t consider it. (I could be completely wrong, though and missing something that would be obvious to a programmer)
Wow, just came back to update on the voltage sensor. Thanks for being so responsive @wicked1! Your settings for voltage reading work great for me.
The hwdef defines
HAL_BATT_CURR_PIN 11
And, when I set in Mission Planner
BATT_CURR_PIN 11
BATT_MONITOR 4
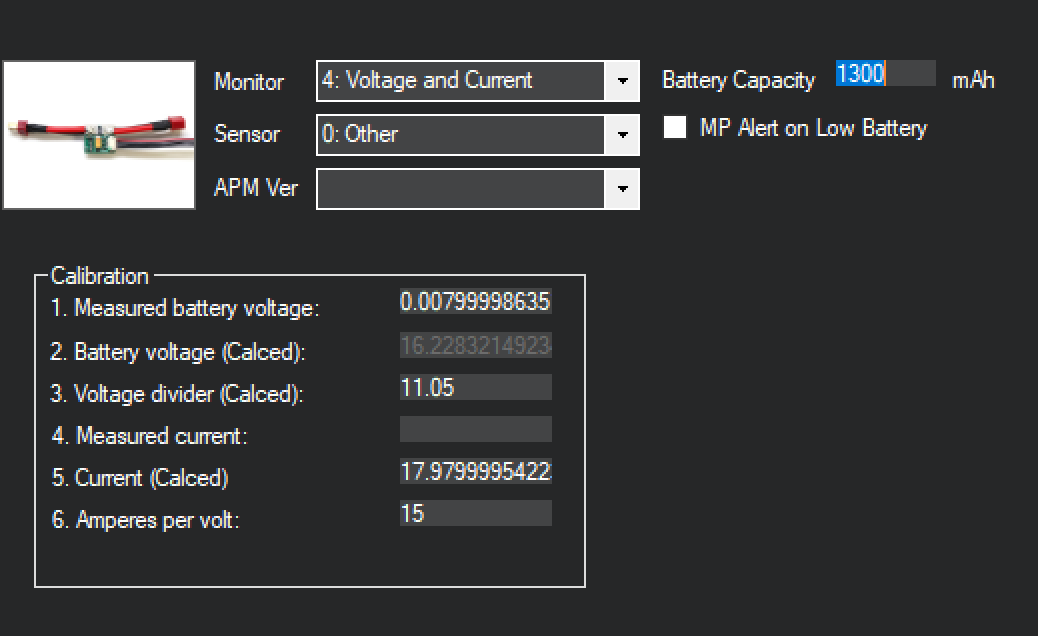
I get a ‘Current (Calced)’ reading, but I’m guessing this is extrapolated from voltage draw since there’s no ‘Measured current’ reading. Attached is a pic of my Battery Monitor tab in Mission Planner.
I just flashed the latest daily build on and I’ll play around with the OSD to see if I can get that to work.
Meanwhile, it doesn’t look like my compass is detected. So far, I’ve attached the SCL & SDA wires to TX3 & RX3 pins, respectively. Then I checked ‘Enable compasses’ and ‘Use this compass’ for all the compasses individually and tried calibrating with no avail.
Mind sharing how you set up your compass? Also, are you somehow black boxing your flights?
My compass was detected successfully.
Look in the full parameter list for the compass ID. I don’t have that computer in front of me at the moment, so don’t know the exact name of that setting… But look in the parameter tree under compass, and one of those is the device ID. If it’s 0, it’s not detected. If it’s got some number, it likely is detected. Some people were having trouble calibrating… lets start w/ seeing if it’s really detected or not.
I am not logging flights, other than tlogs from mission planner.
There was talk in the development forum recently about enabling support for the internal flash, but it’s not working yet.
1 Like
Yep, working now! Batt_volt_mult to 10.913 and spot on.
1 Like
Yeah, looks like COMPASS_DEV_ID is 0.
The compass/GPS module is one out of the Skyviper GPS drone. Any recommendations? Open to just purchasing another compass/GPS module to try.
Some people have needed pull up resistors for the i2c ports.
To implement them you’d put about a 2k (2.2k is a standard value) resistor between each pad (tx3, rx3) and 3.3v.
I didn’t need them… But my wires are very short. (I’m not sure if that makes a difference.)
Dave or Marty, if you see this, did you need pull-up’s for your external compass?
Hi I did not need to us any resistors,mines working o/k,im using the matek gps/compass this one https://www.hobbyrc.co.uk/matek-gps-module-compass,on my board I have the SDA&SCL attached to SDA&SCL on the board and TX&RX atached to the opposites RX&TX need any more info just ask
Anyone tried or have success with using servo’s with this board ?
1 Like
Thank’s Marty.
Then Alan, I would probably start by trying a different compass. Double check your wiring and power, too.
1 Like
Hello! Excellent work, wicked1!
Can you tell us what battery are you using and what maximum flight time did you get? I’m working in something similar, but using Pixracer R14 and a custom 2S battery made with 18650 Sony VTC6 3000mAh cells and I got ~22 minutes of flight time in bench test. I’m just waiting my carbon fiber custom frame arrive. Now I’m using a 3D printed frame just to “fine tune” the assembly. Again, congrats! Thanks to this post, I’ll try some of these F4 flight controller soon… 
Best regards!
1 Like
That’s great! I’ve purchased some good 18650’s to do the same, but haven’t yet.
Right now I’m using a 2s 950mah ‘graphene’ lipo. I can fly for about 11 minutes for a slow flight. Or, I can fly for about 5 minutes at over 80mph! I’m pretty happy w/ the performance.
I’m just having trouble finding a new 2s esc! I’ve noticed all the new blheli32’s either say 3s+ or say “2s (7v)”. And, 7v is NOT 2s!!!
1 Like
Really awesome! A 18650 2S will weight 100g. I don’t know the weight of this battery you are using. Probably you will not get 80mph with 18650, because of discharge rate, but it will at least double your flight time. I will post a video when mine be ready. Regards!
1 Like
Lagging behind, haven’t connected a compass yet. The frame I ordered had the wrong bolt circle for the motors I bought so plan B with another frame.
I did realize today when I connected Frsky Smartport to Rx1 hoping for Telemetry passthrough that it needs to be inverted to work. Could be changed in the Hwdef probably but I’ll just go back to the origanal plan with a telemetry radio for now.
1 Like
@wicked1 thanks for sharing all your experience and knowledge on your microcopter, I would like to see the parameter file if possible.
1 Like
Sorry for the delay… Been out of town for the past several days… Took my microcopter on a canoeing trip! Nothing got wet. Got some good videos. 
n3para.param (16.1 KB)
3 Likes
Strange that there is no compass device ID.
1 Like
Compass does not receive power while connected to USB.
1 Like
I love this… This may inspire me to try one.
1 Like
I ended up ordering the Holybro M8N Micro GPS/Compass. I installed it yesterday and the compass was recognized immediately!
Now I’m having an issue with calibration. I’ve enabled Compass 1 and have attempted the live calibration several times, but none of the offset values change. The calibration progress bar resets to 0% every time it gets to 100%.  I have “External Compass” selected and changed orientation to ‘roll 180’ which seems to give me the correct headings according to the map in Mission Planner.
I have “External Compass” selected and changed orientation to ‘roll 180’ which seems to give me the correct headings according to the map in Mission Planner.
Here are the compass params I have edited so far:
COMPASS_CAL_FIT 32
COMPASS_OFFS_MAX 2000
COMPASS_ORIENT 8
Edit: Accidentally posted before I was done
1 Like