Btw, about gimbal - can you share the details? Does it go on your 7"?
Yeah,
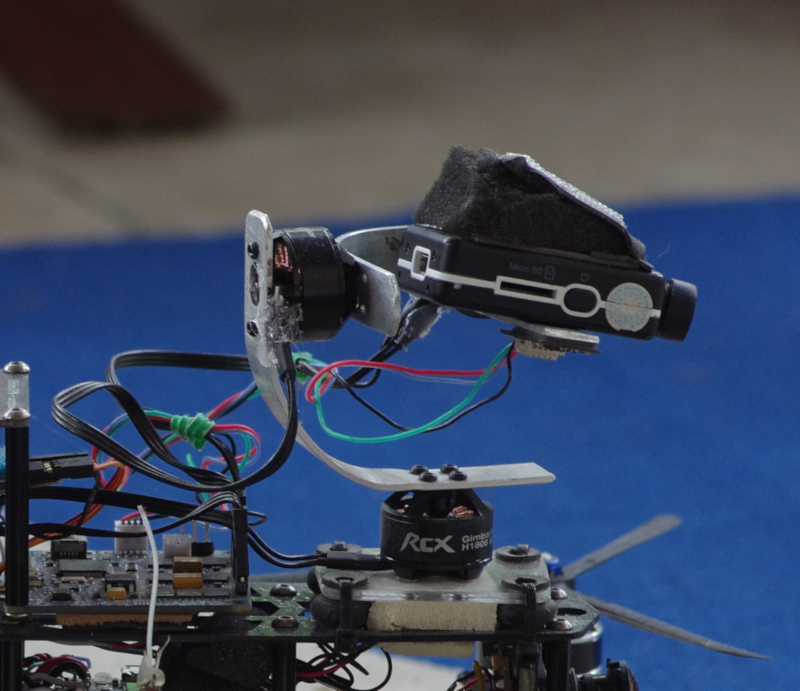
Mine is a 3 axis built w/ aluminum bars and 1806 motors.
A 2 axis like Hugues posted is probably good enough… I might rebiuld mine as a 2 axis hanging off the front, rather than the top mounted 3 axis. Then I could look down w/out the copter in view, which is an issue w/ my current setup.
I don’t have a 7" copter, but this is what’s on my 250mm, 6" prop copter.
Well, I can’t find all my build pics of it… But it’s basically just two curved aluminum bars, and one L shaped holding the camera.
If it’s your first gimbal, the storm32 website has a lot of good info. Main thing: Keep everything balanced. I started w/ the camera. Connected it to its mount, and balanced it on the pitch motor. Then connected the next arm and balanced the entire camera motor arm on to the roll motor. Then attached the last arm and balanced the camera, pitch, and roll motor assembly onto the yaw motor. Then readjusted.
Then you tune the PID’s which is actually pretty simple for storm32.
I found one pic…
Let me know if you have any questions or need more details.
1 Like
If you’re really ambitious you could try making one even smaller, but might have to rewind some motors. There are posts around the web about rewinding motors for gimbals.
It would be awesome to make a gimbal w/ 14xx motors (maybe even smaller) for just the camera/lens portion of the runcam split.
1 Like
For good antivibration properties I tried last weekend these rubber bobbins that seems to work great (but probably for heavier loads than a mobius camera)
I want to make something very compact, may be even single axle, just to keep camera at the horizon level at slow or full speed.
All custom gimbals i made are on storm32, but it is too big for a racing small copter. I tried to check if there is anything smaller out there, with imu on board and small imu for camera, but, so far nothing.
The 30.5x30.5 size storm32 board isn’t bad for a 250mm size copter.
But, noting for the little microcopters yet.
If all you want is a tilt adjustment, you can use arducopters built in gimbal stuff and a small servo. It’s not as fast or smooth as a brushless gimbal, but it works. If you’re only stabilizing one axis, it’s likely good enough.
what are you guys now recommending for a 20x20 board please
Omnibus nano is still the only option for flight controller.
1 Like
Maybe a suggestion to explore ? : for just maintaining the camera horizontal on one axis, why not just use gravity with a pendulum ? No electronics, no boards, light weight, you can build it a as compact as you want with roll bearings ?
1 Like
pendulum would not work on a racing style 6" or 7" frame - it needs to be on a gimbal motor. the whole idea however silly it is is just to be able to rotate camera in the pitch plane so going at full speed 75deg attack angle and when loitering flat it would look at the desired spot. not necessarily the horizon, it may be mostly ground, anyway, i bet you get the idea.
i found a pre-made gimbal like that, but, it did no work at all. somebody else also was writing about doing something similar, but i lost track of it all. or it could have been in this very thread, but a bit earlier. 
i never explored it much but arducopter code also has a gimbal support and control. i just need some time to look at what is in there, as now i have a properly working setup to mess with the code…
It works great… Auto levels. Just need one small servo.
servo will sit on the direct pwm output from the copter in this setup? and 1v output from pwm is enough to keep camera from rotation? sorry for silly questions, i did not do it before.
it sounds like all i need, most likely. jsut need a servo small enough and strong enough to hold a camera with a cord from split mini board.
I connected it to the 5v servo output of a pixhawk, when I was using it.
So, 5v, Ground, Signal, are the wires that are connected. Same row of connectors on the back of the pixhawk that the ESC’s connect to.
i do not think we have it on most f7/f4 boards - or, may be we have - the buzzer pin is usually fed 5v levels. may be that one would work. it is worth trying, may be.
Any board that works w/ planes would definitely have the traditional ground,5v,signal connectors, because planes need servos. That includes some of the f4/f7 boards. But if you don’t have a traditional servo connection, I don’t think it would really matter where the servo gets its 5v.
what i meant the signal level for the servo - not the power feed. the controlling signal itself - is it expected to be 5v level, or 3.3v level? or does it even matter?
Oh, I’m not sure. It’s the same signal the ESC’s get.
got it, a pwm standard level output. thx. i will try to look it up. i guess it requires a specific pre-built servo, it will not work with a custom gimbal motor? any recommendation on what servos work best as gimbals?
Anything digital, really quick, and with little play in the gears.
A very good but expensive option: the MKS X08 V5.0 HV
Or on a budget, Blue Arrow D03013 or Emax ES9251 (i fly indoor planes and these are used (with modifications) in the highest level competitions).
But i’ve never seen a nice stable looking image from a servo-gimbal. I like the idea of using storm32 with some gimbal motors from a DJI mavic (you can buy on ebay <15$), they’re small and have and encoders.
1 Like