@andyp1per returning to your last PR on gyro rate I tested your last small-copter-4.1 (as of today) with my other 3 inch copter with revo-mini, same config as post #871
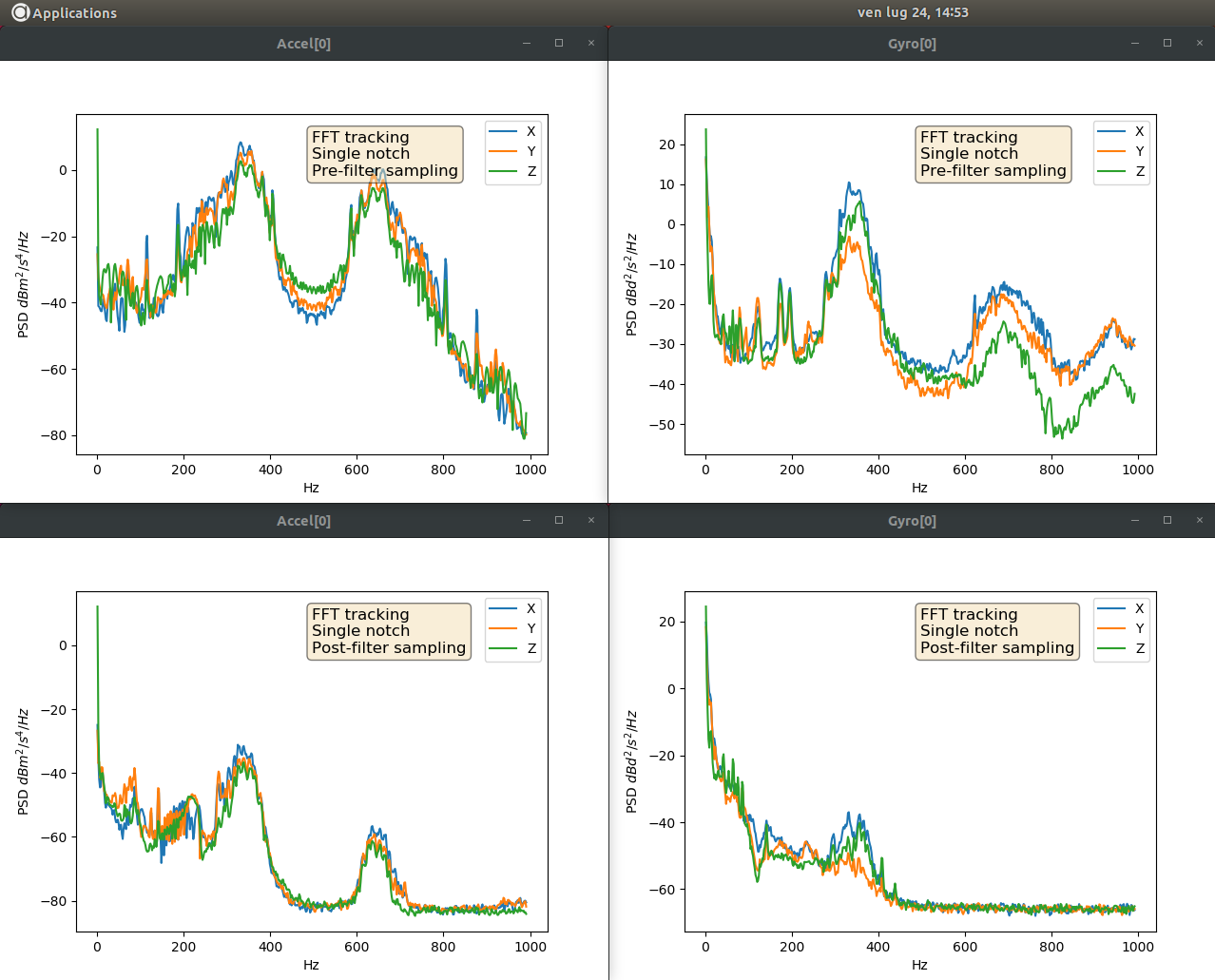
INS_GYRO_RATE = 1
FFT_WINDOW_SIZE = 64
[Edit]
Changed image, it was the wrong one.