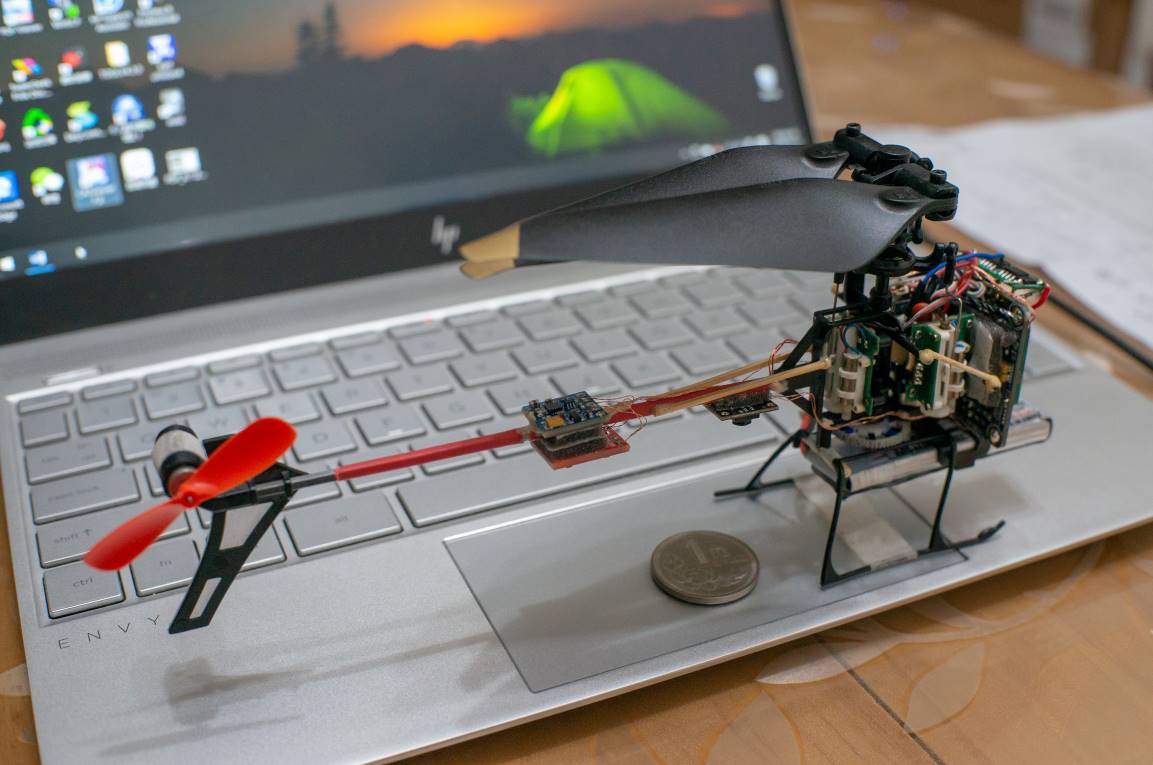
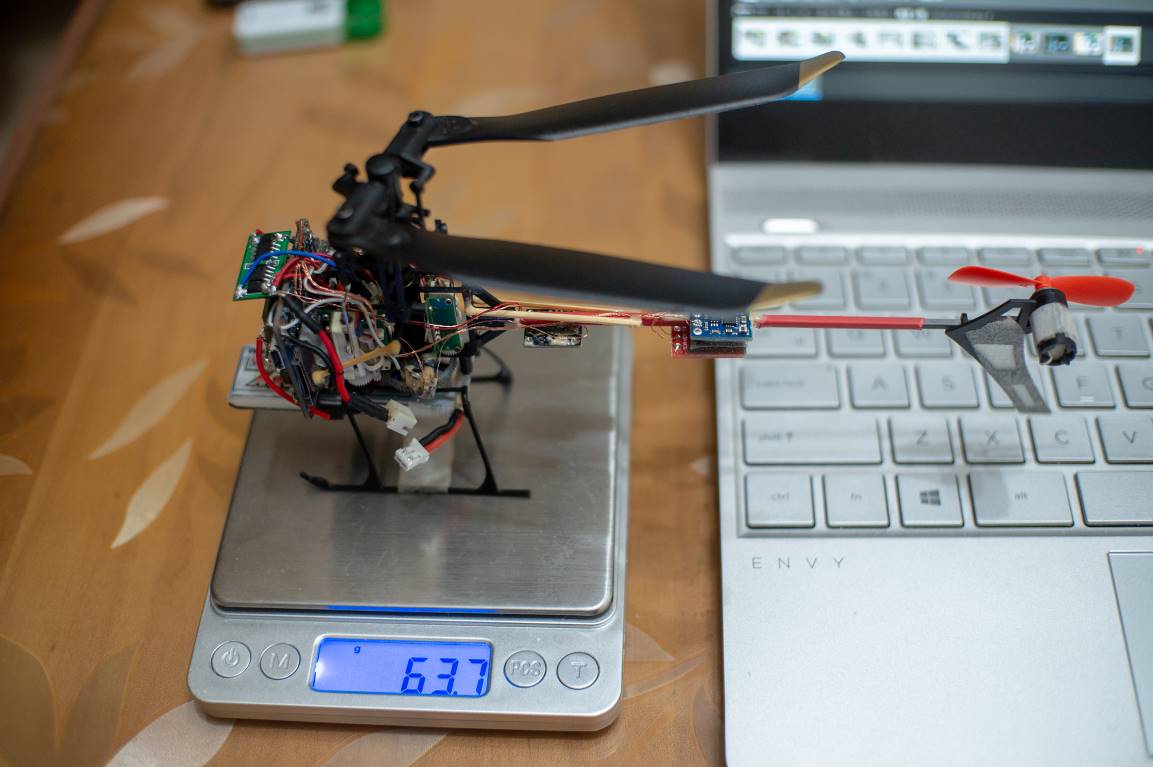
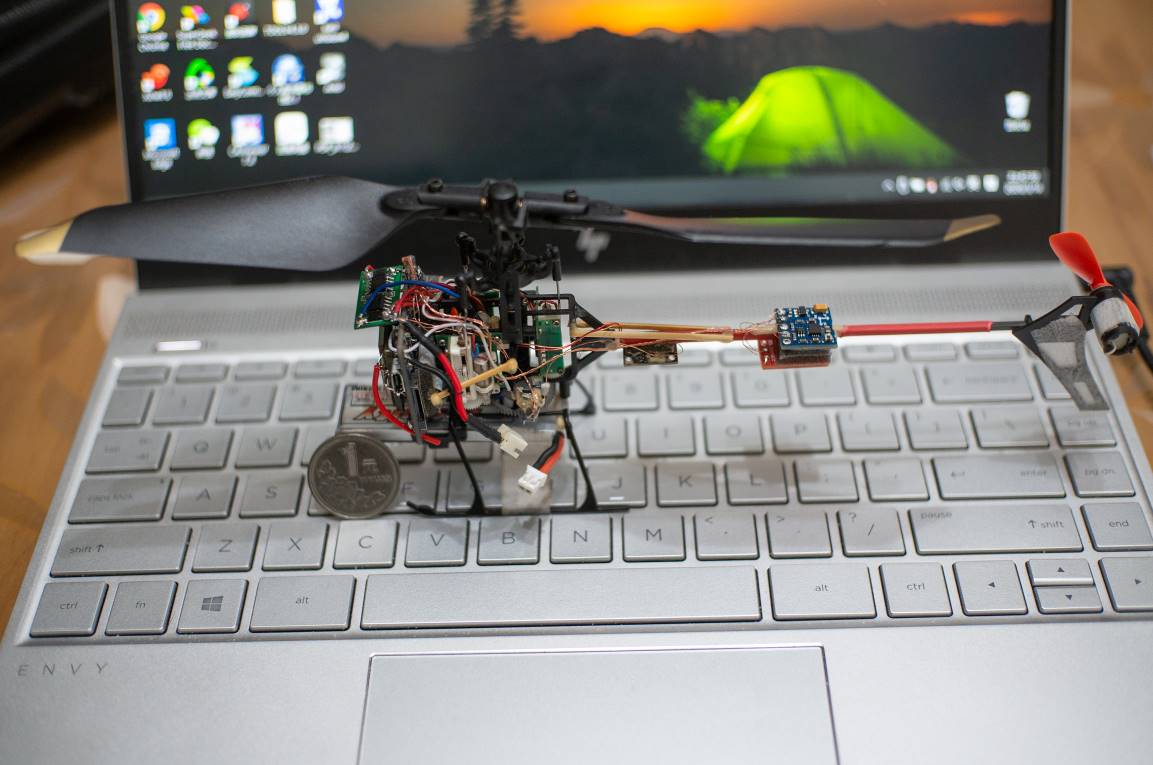
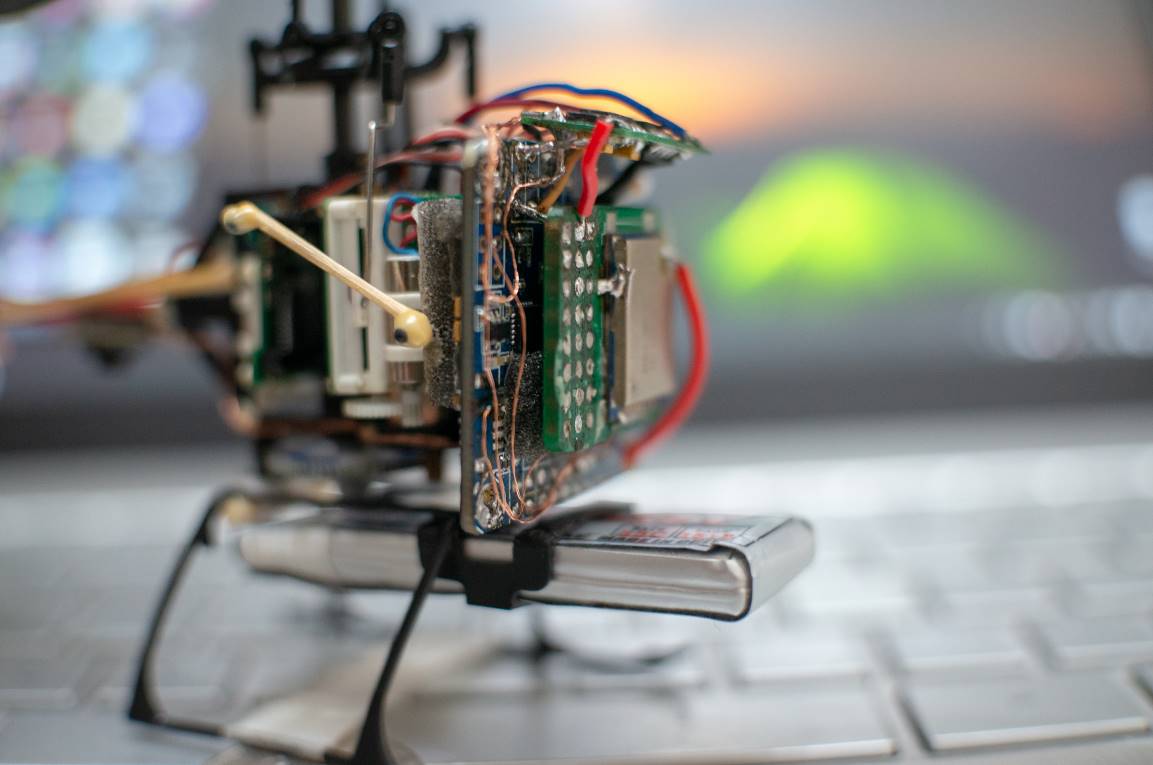
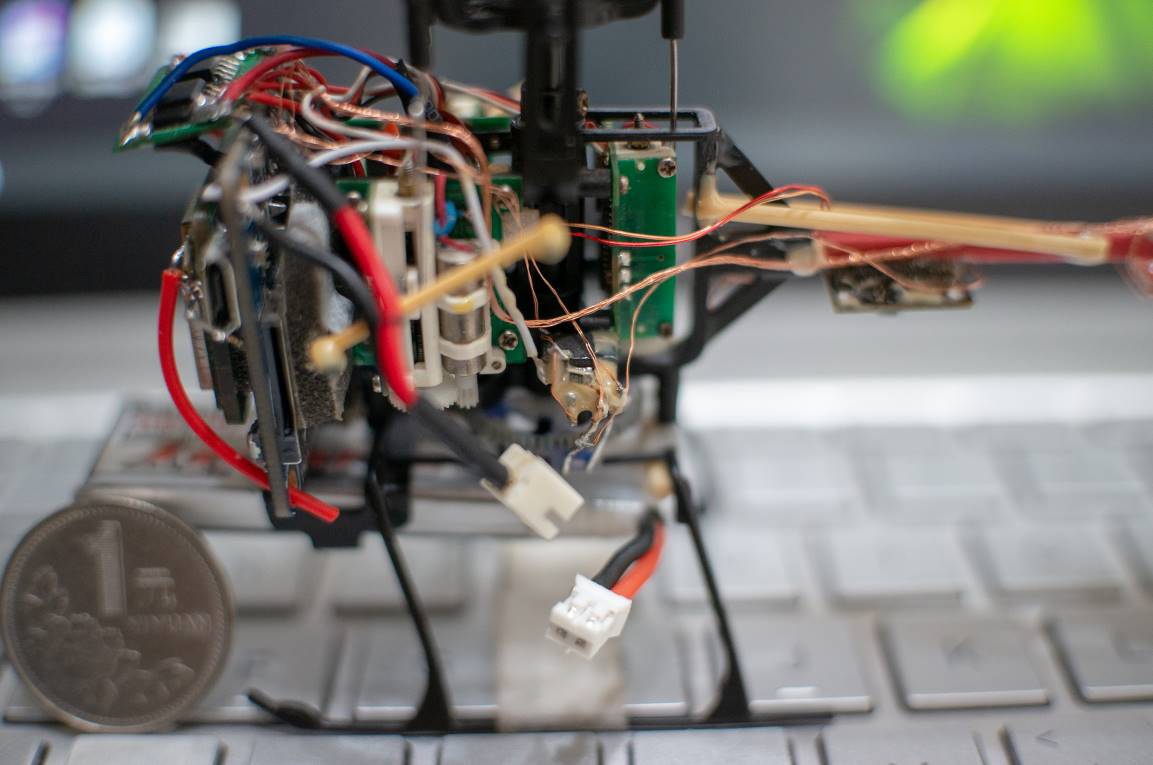
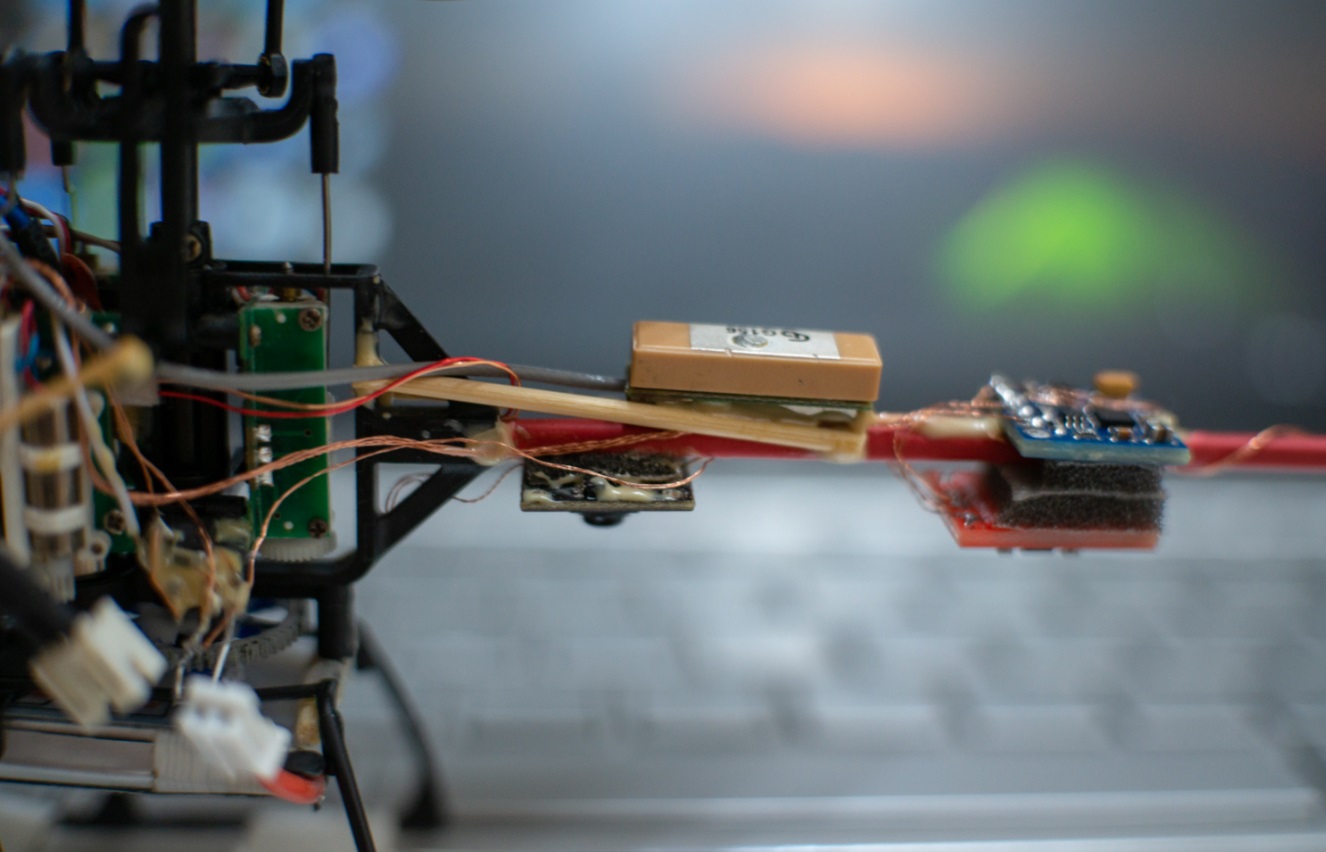
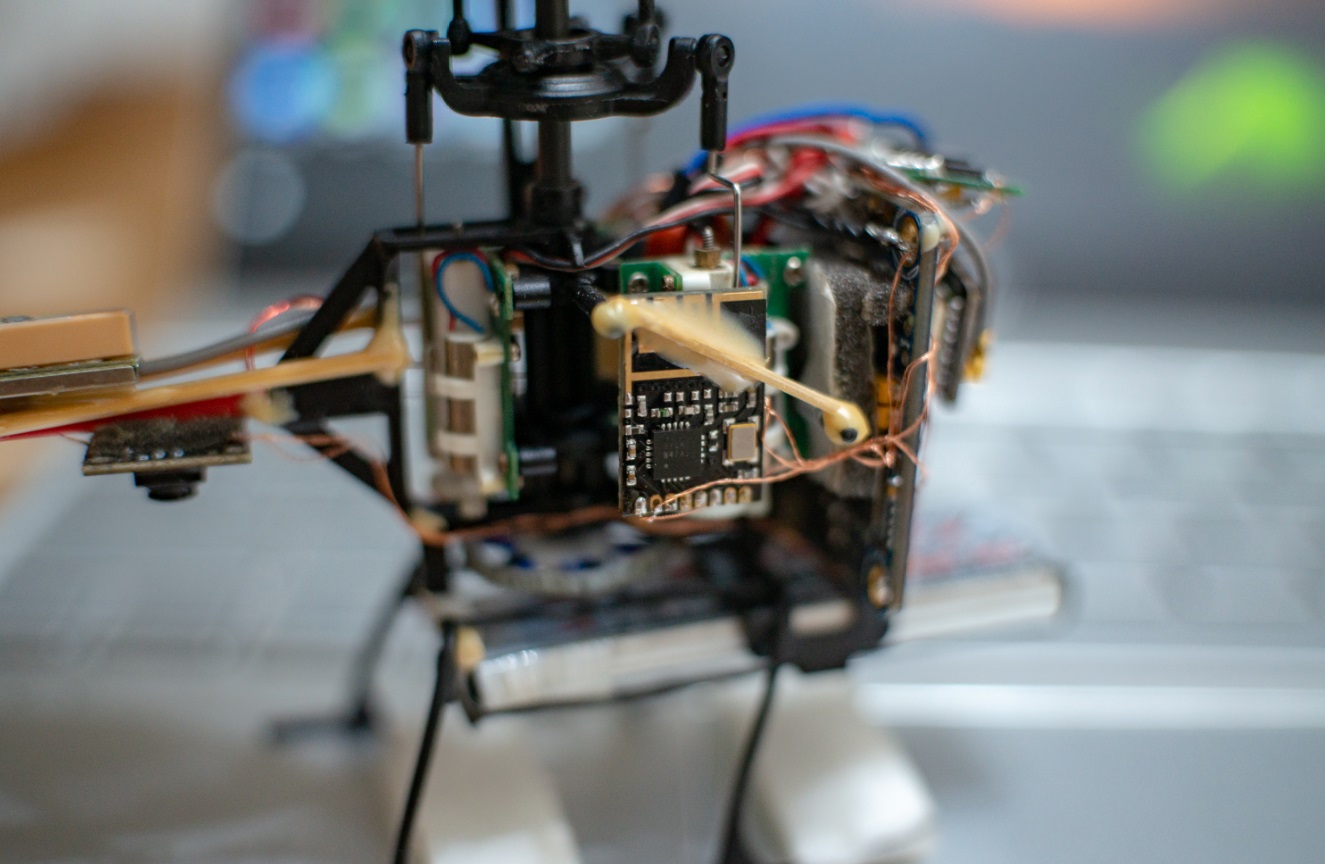
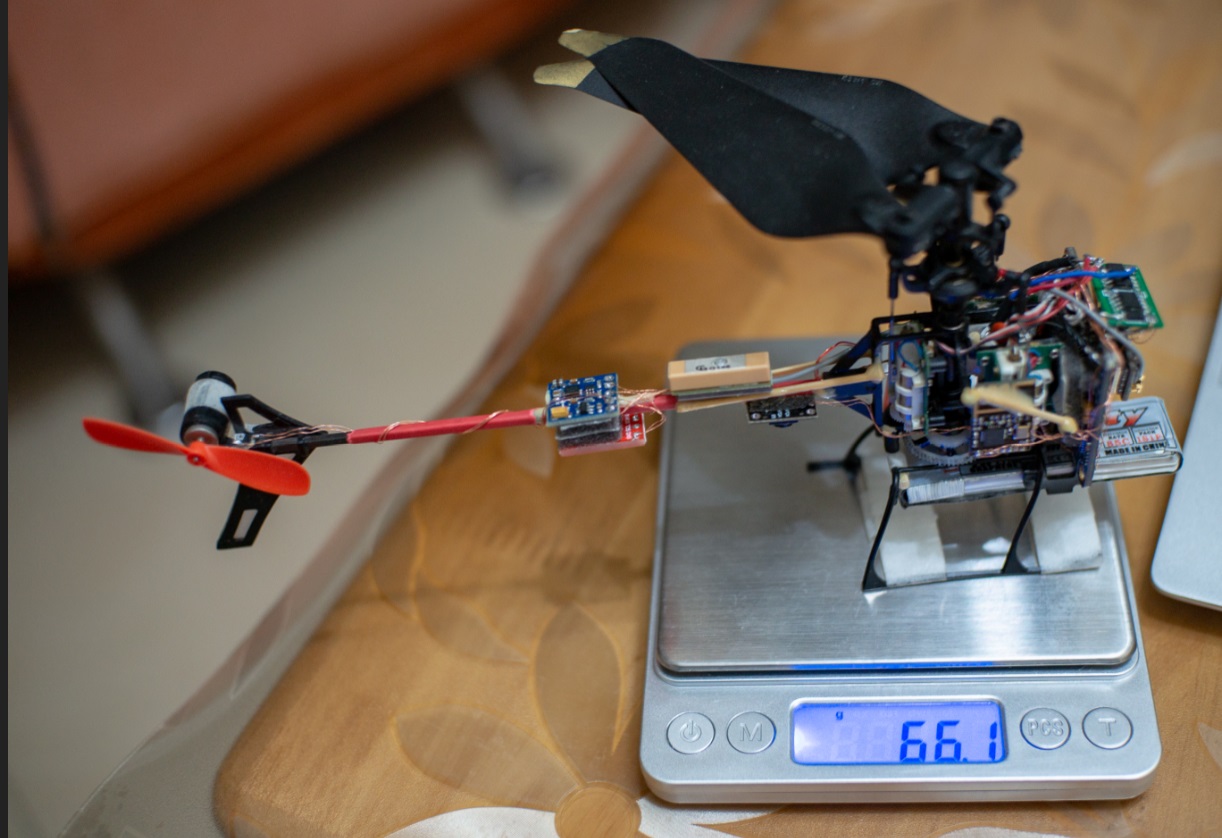
I made this aircraft based on the toy helicopter WLtoys V922.I use F4V3 as the main control board with some circuit modification to work with 1S battery.I changed main motor to 1020 coreless motor and propeller to DJI mavic propeller(d=22cm),lead to 11 mins flight time.
Below,there is the hardware and price list.
15$ Fuselage and server: original parts of WLtoys v922
3$ Battery: 3.8V 1s 450mah 85C
6$ Main control: omnibusf4v3
2$ Blade: DJI 8331f
0$ Tail motor: 716 coreless motor
3$ Electric adjustment: two-way brush esc
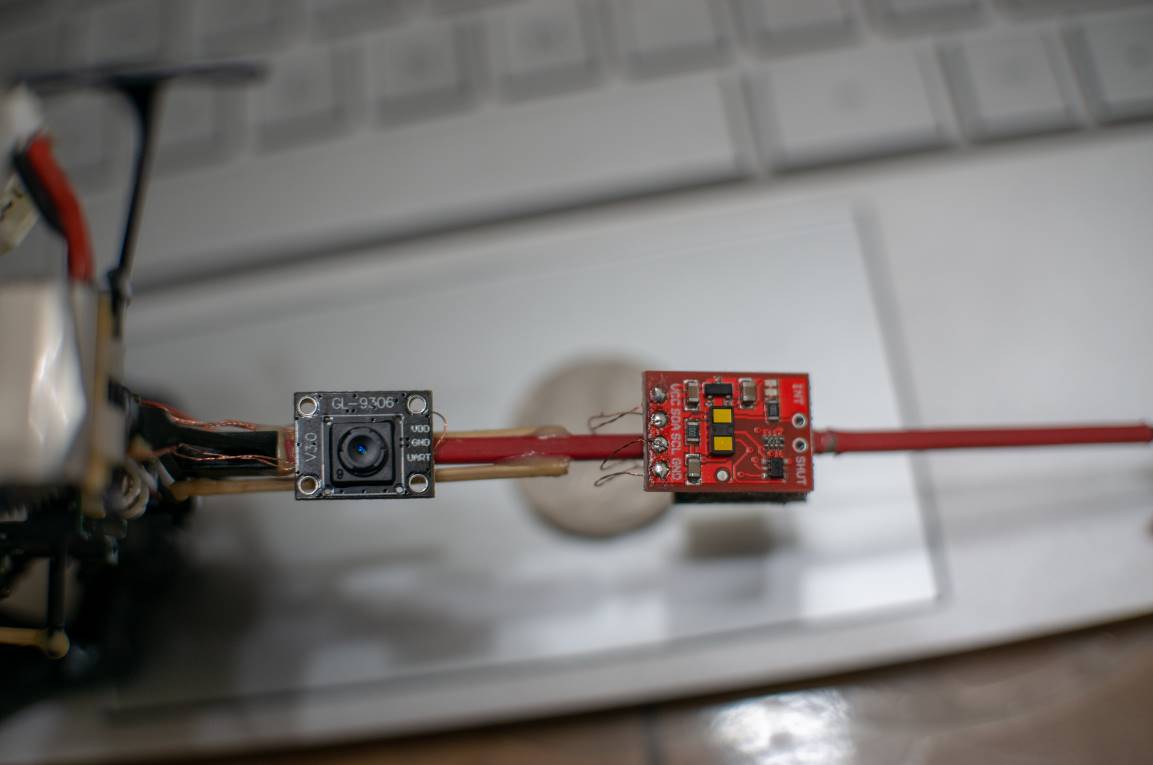
5$ Laser ranging module: vl53l1x
9$ Optical flow module: cx-of v3.0
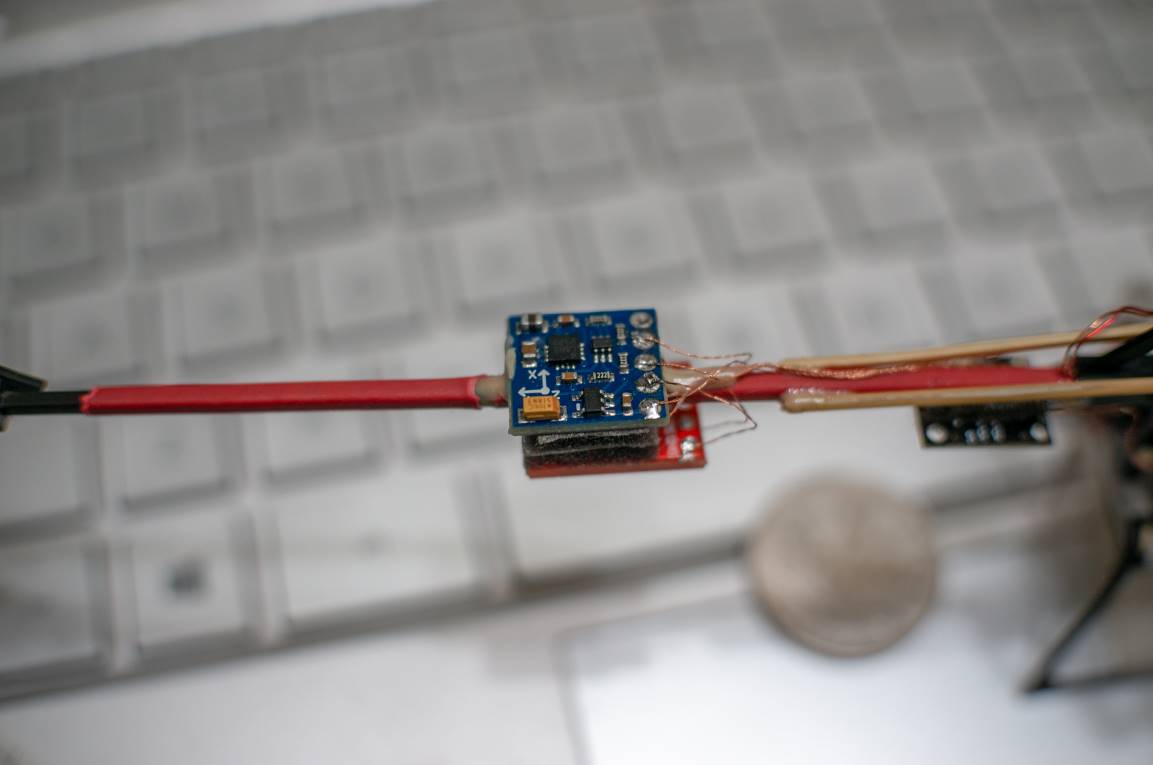
2$ External Compass: hmc5883
NEXT,I would like to share some pictures and videos with you
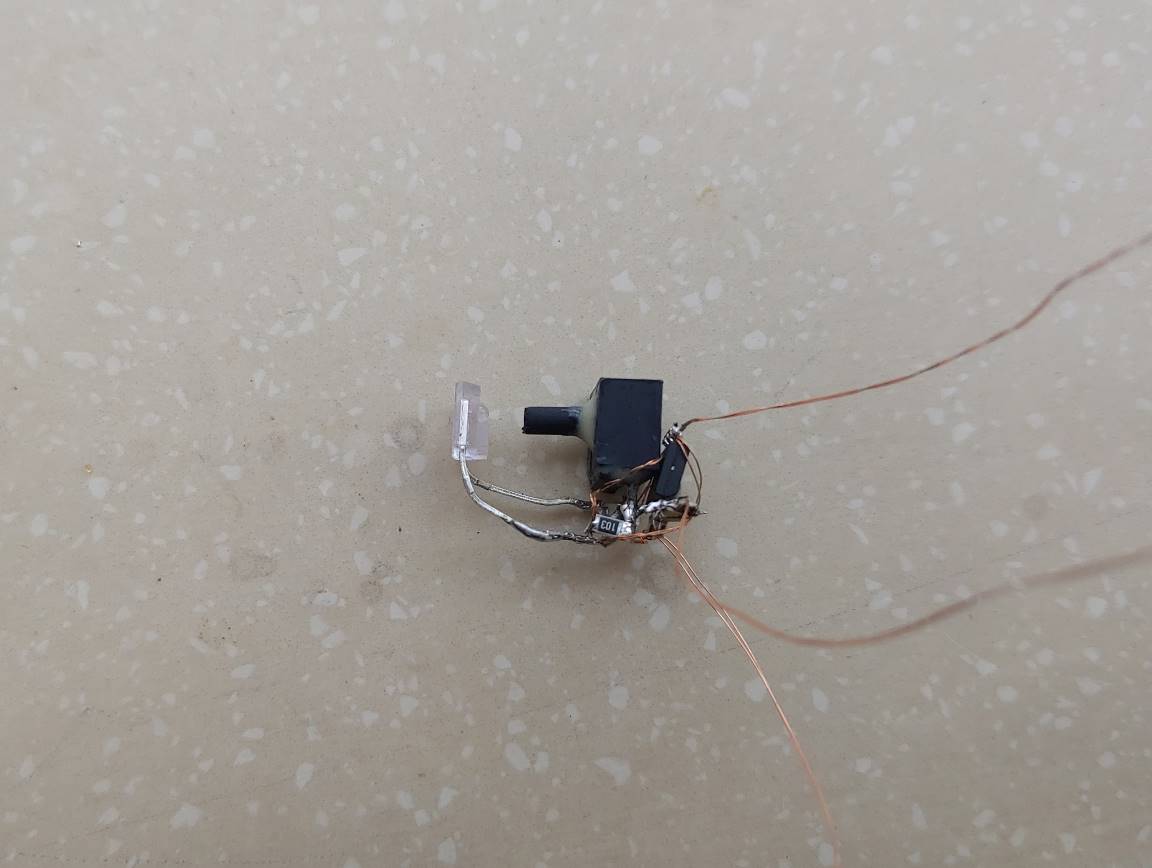
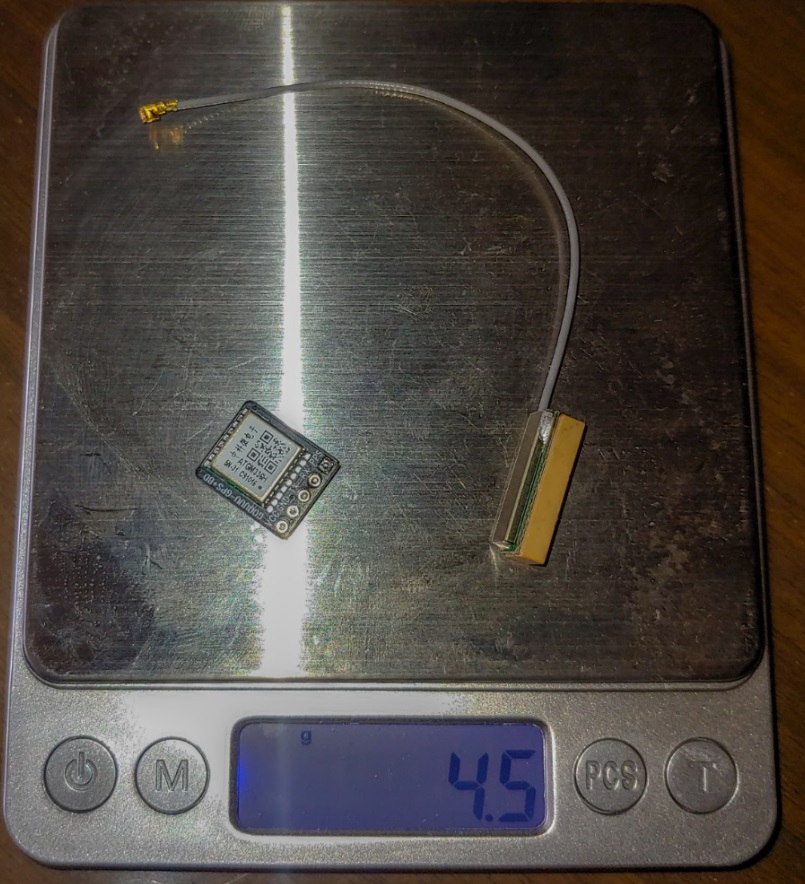
Sorry, I haven’t had enough time to write a step-by-step instructions recently. As for the FPV camera, I think it is feasible. This kind of FPV AIO CAM is only 3g heavy, and I designed a two-axis simpler servo-driven gimbals, which provides pitch and roll stability. This gimbals only weighs 4g.
At the same time, I think it is possible to take off with a weight of about 120g and a endurance of 50 minutes under the condition of changing the battery and carrying the above equipment, through some improvement of the power system.
Thanks for the quick response and the information. Great to know that you continued to work on your project and added even more peripherals to it.
I wish I can do a similar project successfully. I hope I can find an RPM sensor, ultra light radio receiver, and FPV AIO CAM gimbals that are as lightweight as those you built.
Additional questions sir, I apologize, I was just really fired-up to see your post and project—
(1) You mentioned “I use F4V3 as the main control board with some circuit modification to work with 1S battery,” can I ask for the modifications that you did?
(2) You also mentioned “under the condition of changing the battery and carrying the above equipment, through some improvement of the power system,” can you give me e brief background of how you would be able to do that?
Take-off with a weight of 150 grams and endurance of 50 mins will be awesome!
Looking forward to you response. Thank you very much, sir.
(1)I remove the diode as per here: https://www.rcgroups.com/forums/showthread.php?2874687
and short this pad to reduce voltage drop,unnecessary plug and on-board switch dropping-voltage module are removed to reduce weight,but I think the Kakute F7 Mini is the best choice.
(2)I will change the battery to DJI mavic 2‘s high capacity battery.It has a capacity of 3850mah and a weight of 55g.Regarding the power system, I will add a 820 coreless cup motor and replace the propeller with DJI 8743f.
I’ll start looking for the same parts that you used for your project and those that you further suggested.
I’m expecting a XK K110 heli coming this week, I really don’t know if it is compatible with the heli and parts that you used. I ordered it a week before I saw your post. Do you think it is appropriate for the project? If it’s not, absolutely have to get the same heli as yours.
I’ll be doing a project like this for the first time, better late than never. I hope I can ask questions again later on.
I think the K110 is a very suitable helicopter, even more suitable than the v922.
You just need to replace the propeller and battery.
I look forward to seeing your work some day.
Great! Looks like I’m on my way to a good start, I hope…
Yup. I will definitely show you my work and most probably ask another question while working on it…
Here I go again. I already have my K110, it flies smoothly, I like it.
Now, I will move forward and start getting the parts similar to what you have posted that I will need for my project which is inspired by yours. I am also thinking of using the Kakute F7 Mini, as you suggested.
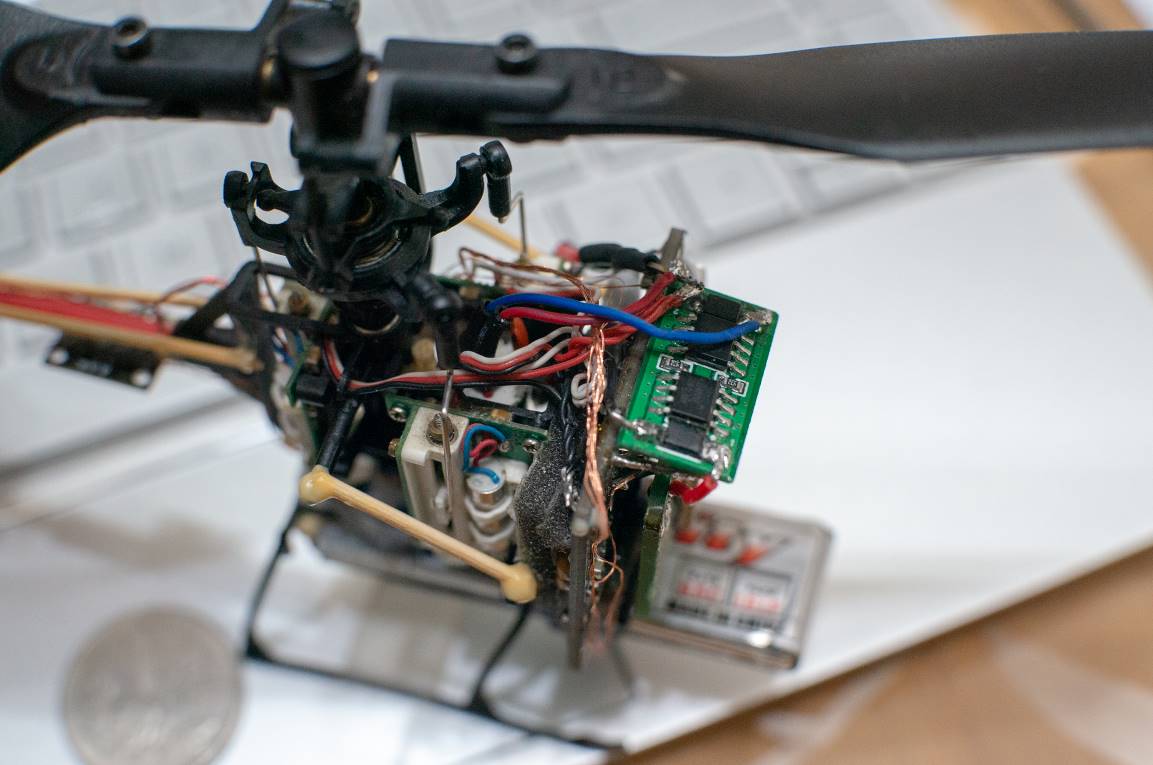
Can I request for some pictures of your micro Heli that show the wire connections in your flight controller and ESC as a reference?
Congratulate for this project! I like helis, but I built only multirotors so far. I have read the mentioned traditional heli AP setup guide. and I have a question:
What setting do you use for the H_RSC parameter? Throtle curve, or governor? You mentioned that you constructed an RPM sensor. To which pad did you connected it on the OmnibusF4? And how did you set it up in the Mission Control?
Hello there! My parts are starting to come in, finally. Some questions again…
I would be using a Kakute F7 Mini on either K110 or K120.
In terms of the three servos, (1) do they need separate ESC/s? Or can it be directly wired to the FC?
Same with the tail rotor, (2) should it also use a separate brushed ESC?
With regards to my project, I used a Kakute F7 Mini but can’t make the motor spin even if the heli is ARMED. I am thinking that I have the wrong setup. I connected my Servo 1 to M1; Servo 2 to M2; Servo 3 to M3; Tail Motor to M4; and Motor to M5.
Can you share a screenshot of your heli setup?
Just wanted to compare my setup with yours.
The servos and tail motor work but the main motor does not.
Hoping for a response.