Thank you for the comment. I was able to arm the heli.
Now my problem is the rear left servo. I already had it replaced but still it’s not working. It was erratic at first then now it’s totally not working.
Another is that the tail motor spins continuously upon plugging the batteries in.
@romulo please post your parameter file. Are you using DDFP or DDVP?
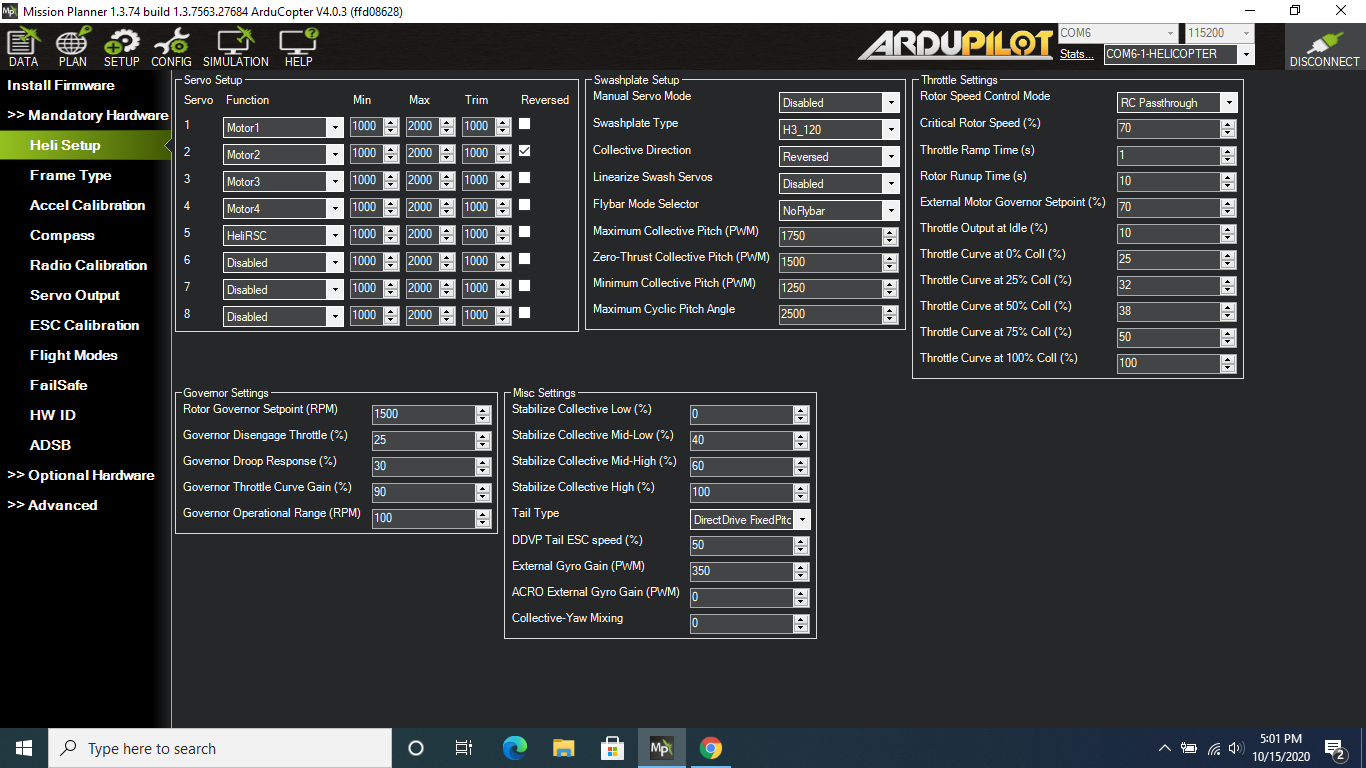
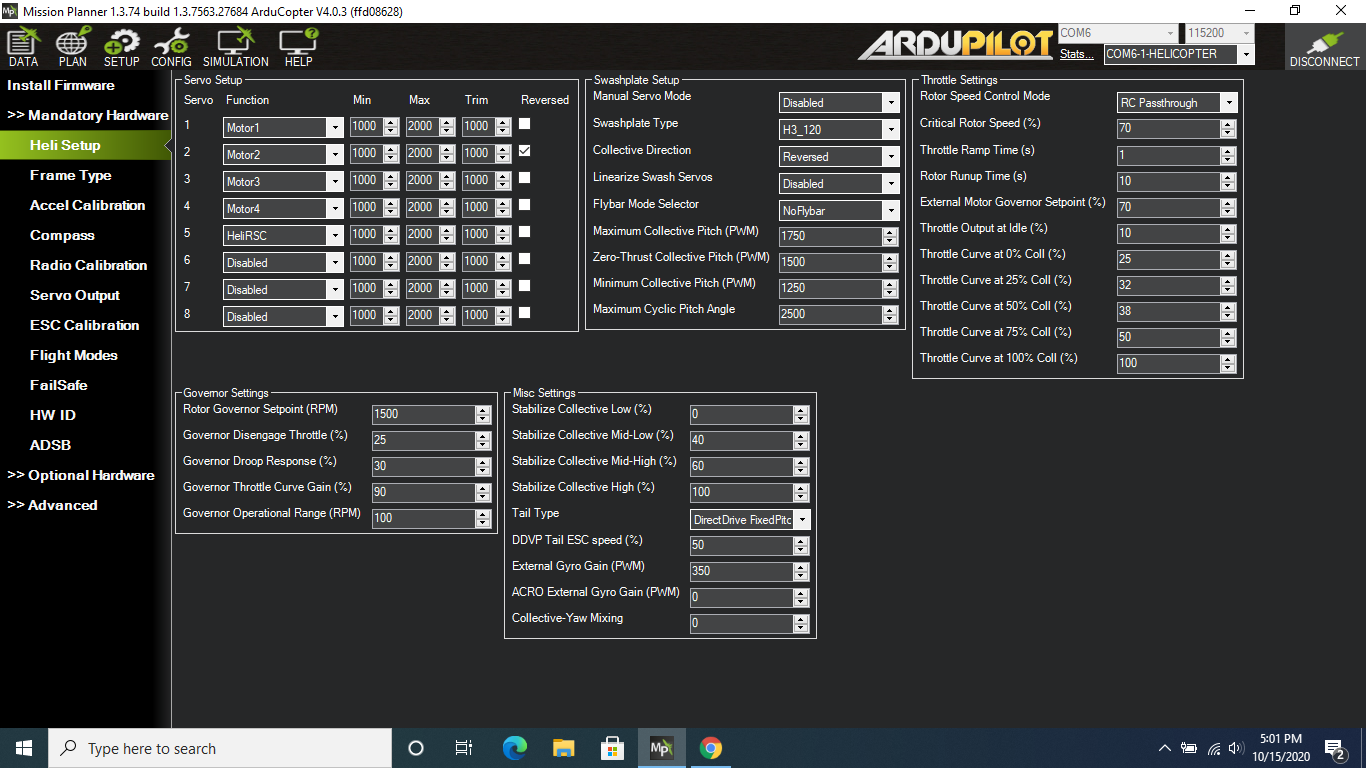
DDFP must be selected as the H_TAIL_TYPE and motor 4 must be assigned to the servo channel that the ESC is connected. For DDVP, DDVP is selected from the H_TAIL_TYPE. Motor 4 is assigned to the servo channel that the tail pitch servo is connected and TailRSC is assigned to the servo channel that the ESC is connected.
@romulo Thanks for sending me the picture. that helped me some. First I verified that the software worked as designed and didn’t cause a premature start of the tail motor. And the software works as designed. So now we have to figure out what about your set up is causing this. I guess the one thing I want you to verify for me is the output of the servo 4 channel after you connect the battery then after you arm and then after you enable motor interlock (start the main rotor turning). First you will want to disconnect the ESC from channel 4 output and disconnect your main motor. or if you can just disconnect power to both ESCs that would be good so you don’t have to worry about the heli spooling up and hurting you. So now on to how to check the output from servo channel 4. You can do this by powering your heli and then connect to it using mission planner. Before arming, go to the Data tab in mission planner. Under the HUD, there are a bunch of tabs in the panel. Click on the Status Tab and scroll until you see “ch4out”. Before you arm and after your arm, that should read the min value which from your set up screen is 1000 PWM. After you enable motor interlock it should go to the trim value. I noticed that your trim value for motor 4 is 1000 which I would think is wrong. This should be something close to 1500. you could probably just set that initially. It should power up and then figure out what the motor needs to be to keep the tail straight. So if the output of channel 4 is shown in Mission planner to be the Min value when it is first powered and then armed, then the controller is working properly and there is something not set correctly in the ESC.
Now another thing I noticed in your set up screen is that you have all of the other motor trims at 1000 too. That is not right either. They should be around 1500 as well but adjusted so that the swashplate is level. Then you need to set your lower and upper collective pitch using the H_COL_MIN and H_COL_MAX parameters. It doesn’t look like you did this as they are the default parameters. Did you complete your swashplate setup per the tradheli wiki?
I hope you are able to figure out your tail ESC issue. Let me know.
What a great project,im going to convert my OMP M2 into a arducopter trad heli,due to ill health I have to try and take it easyso will take my time doing this,first question ive got a mRo zero seven flight controller or a matek F 405 std i can use, I think the zero seven would be best to use,all advice welcome and expect many more questions
{kind=link}